§ 1.5. Приведение системы сил к простейшей системе
 Пусть на тело
действует система сил
Пусть на тело
действует система сил  .
.
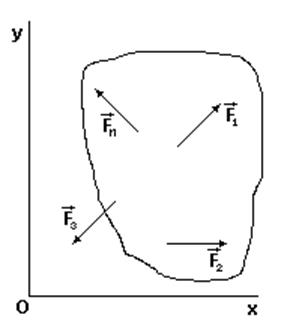
Приведем систему сил к заданному центру (докажем теорему Пуансо). Выберем произвольную точку О за точку приведения. Рассмотрим одну из сил системы – F1. Добавим в точке О нулевую систему сил – (F1',F1") ( |F1| = |F1'| = |F1"| ). Заметим, что силы (F1,F1") представляют пару сил, которую можно заменить вектором момента пары M0(F1), приложенным в точке О (он же равен моменту силы F1 относительно центра О), т.е. исходная сила эквивалентна силе F1' и вектору момента пары, обе приложены в точке О.

Проведя
аналогичную операцию со всеми векторами исходной системы сил мы получим два
пучка векторов, приложенных в точке О – пучок сил  и
пучок векторов моментов
и
пучок векторов моментов  , которые приводятся к
эквивалентной системе двух векторов:
, которые приводятся к
эквивалентной системе двух векторов:
Главным вектором системы сил называют вектор, равный векторной сумме этих сил (вектор равнодействующей R).
Главным моментом системы сил относительно точки О тела называют сумму векторных моментов всех сил системы относительно этой точки (вектор момента результирующей пары М0). Вектор М0 зависит от точки приведения О.
§ 1.6. Условия равновесия систем сил
Пространственная система сил
Если система сил находится в равновесии, то в равновесии находится и эквивалентная ей система, состоящая из равнодействующей и результирующего момента пары. Чтобы такая система сил была эквивалентна нулю, необходимо и достаточно, чтобы
 (для любой точки О)
(для любой точки О)
Эти условия являются векторными условиями равновесия для любой системы сил. В аналитической форме это эквивалентно Rx=Ry=Rz=0; Mx=My=Mz=0, т.е. в самом общем случае имеем шесть скалярных уравнений равновесия.
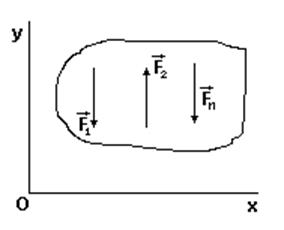
Пространственная система параллельных сил
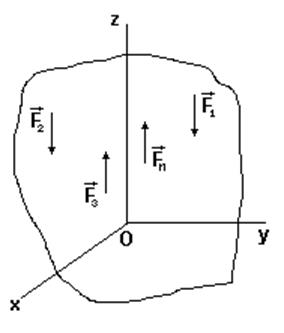
![]() Oz, т.е.
Oz, т.е. ![]()
![]()
Mz тождественно равно нулю, 
Имеем в итоге три уравнения:

Плоская система сил

имеем три уравнения
 (для любой точки)
(для любой точки)
Для плоской системы параллельных сил имеем два уравнения равновесия:
 (для любой точки)
(для любой точки)
Теорема о моменте равнодействующей силы (теорема Вариньона)
Пусть
система сил не находится в равновесии и может быть приведена к равнодействующей
 .
.
Добавим к этой
системе сил ![]() , тогда
, тогда

Эта новая система сил, эквивалентная нулю, удовлетворяет условиям равновесия системы сил и, в частности, условию равенства нулю суммы векторных моментов сил относительно любой точки:
Т.к.
 , то имеем теорему Вариньона
, то имеем теорему Вариньона
Это справедливо и в любых проекциях, например  , т.е. для плоской системы сил имеем
теорему Вариньона в алгебраических моментах
, т.е. для плоской системы сил имеем
теорему Вариньона в алгебраических моментах
Различные формы условий равновесия плоской системы сил:
1.
Ранее приведенная форма условий - 
2. Эквивалентная ей система уравнений равновесия

для любых трех точек, не лежащих на одной прямой.
3.
Также эквивалентная первой система 
для любых точек А и В, если ось х не перпендикулярна отрезку АВ.
Для
равновесия плоской системы параллельных сил имеем альтернативную форму условий равновесия  для
любых точек А и В:
для
любых точек А и В:
Статически определимые и неопределимые задачи
Для любой системы сил для разрешимости задач необходимо, чтобы число неизвестных сил не превышало максимального числа возможных уравнений равновесия. Такие задачи называют статически определимыми. В противном случае задача статически неопределима в рамках моделей твердых тел.
Равновесие системы тел
При
рассмотрении равновесия системы сил, приложенных к системе нескольких
взаимодействующих между собой тел, мысленно расчленяем систему на части и
внутренние силы для части считаем внешними силами. Внутренние силы образуют по
аксиоме о взаимодействии равновесную систему ( ).
).
§1.7. Внутренние напряжения в конструкциях
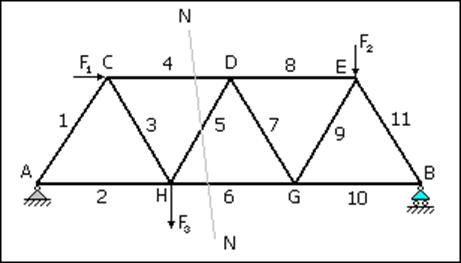 Рассмотрим
ферму – плоскую жесткую конструкцию, состоящую из стержней, соединения стержней
шарнирные. К ферме приложены внешние сосредоточенные нагрузки F1, F2
и F3. Необходимо определить, с какой силой сжаты или растянуты все
стержни фермы. Это типовая задача для инженерного расчета на прочность
строительных конструкций (фермы опор линий электропередач, мосты и пр.)
Рассмотрим
ферму – плоскую жесткую конструкцию, состоящую из стержней, соединения стержней
шарнирные. К ферме приложены внешние сосредоточенные нагрузки F1, F2
и F3. Необходимо определить, с какой силой сжаты или растянуты все
стержни фермы. Это типовая задача для инженерного расчета на прочность
строительных конструкций (фермы опор линий электропередач, мосты и пр.)
Ферма в точке А закреплена в шарнире в точке В – опора. Существует ряд методов для решения этой задачи. На первом этапе применения всех методов необходимо рассмотреть конструкцию как единое целое, находящееся под действием заданных нагрузок, и определить внешние реакции (для нашего случая это реакция шарнира А и опоры В). В некоторых частных случаях результаты этого этапа могут не влиять на значения напряжений в некоторых стержнях, однако при определении напряжений во всех стержнях фермы внешние реакции требуется определять.
Чаще используются два метода: метод вырезания узлов и метод Риттера.
а) метод вырезания узлов заключается в последовательном мысленном вырезании узлов и рассмотрения условий их равновесия. Все стержни фермы считаем сжатыми. Тогда при рассмотрении равновесия узла действие разрезанных стержней на узел заменяем реакциями, направленными к узлу. Так для нашего случая для узла А будем иметь задачу:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

