|
|
Предел относительной статической погрешности измерения степени насыщения составляет:
|
|
Если использовать модели измерительной информации 5.2 -:- 5.4 , то можно моделировать метрологические характеристики измерительной системы. При этом, удобно рассматривать не абсолютное, а нормированное значение методической динамической погрешности μ:
|
|
(5.9) |
где DΔд - дисперсия методической динамической погрешности измерения степени насыщения абсорбента; σ[Δст] – среднеквадратическое отклонение статической погрешности измерения степени насыщения абсорбента.
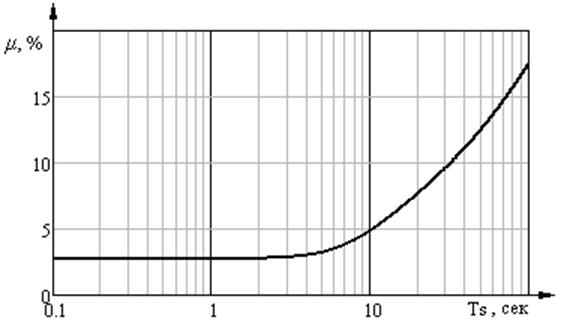
На рисунке 5.3 представлена зависимость нормированной динамической погрешности от периода опроса датчиков [9], согласно которой в качестве верхней оценки значения периода опроса можно принять TSвер = 4 сек. Так как дальнейшее уменьшение TS не приводит к существенному снижению динамической погрешности эту оценку можно считать оптимальной.
|
|
|
Рисунок 5.3 – Зависимость нормированной динамической погрешности от периода опроса датчиков |
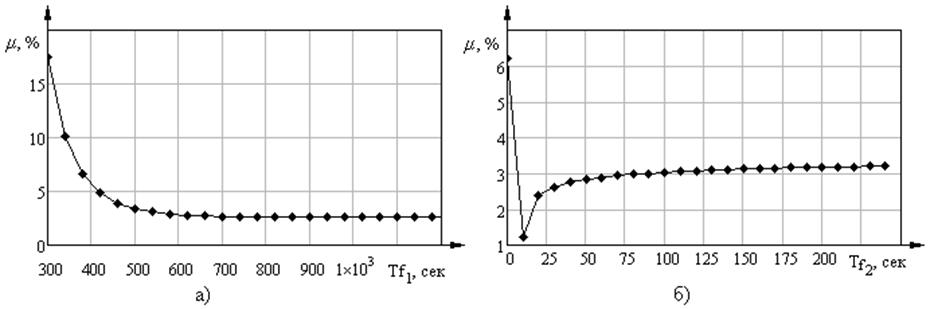
На рисунке 5.4 представлены зависимости нормированной динамической погрешности от постоянной времени программного фильтра: а) в канале измерения концентрации вещества на входе в абсорбер; б) в канале измерения концентрации вещества на выходе из абсорбера [9]. Из графиков видно, что значение постоянной времени фильтра в канале измерения концентрации вещества на входе в абсорбер целесообразно выбрать равным Tf1 = 600 сек. Значение постоянной времени фильтра в канале измерения концентрации вещества на выходе из абсорбера целесообразно выбрать равным Tf2 = 10 с.
|
|
|
Рисунок 5.4 – Зависимость нормированной динамической погрешности от постоянной времени фильтра а) в канале измерения концентрации вещества на входе в абсорбер; б) в канале измерения концентрации вещества на выходе из абсорбера. |
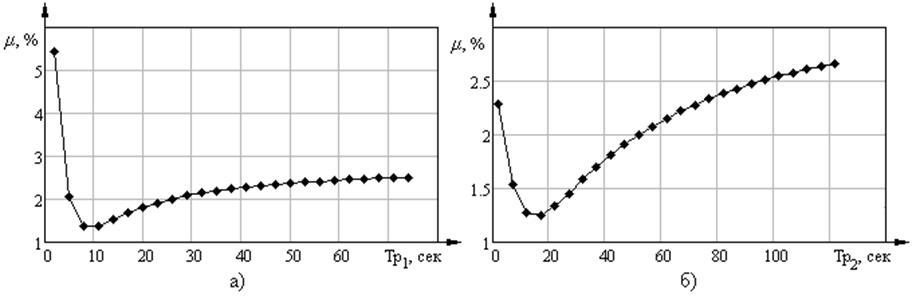
На рисунке 5.5 представлены зависимости нормированной динамической погрешности от постоянной времени плотномера: а) в канале измерения концентрации вещества на входе в абсорбер; б) в канале измерения концентрации вещества на выходе из абсорбера [9]. Анализ графиков показывает, что значения постоянных времени датчиков необходимо выбрать равными: Tр1 = 10 с, Tр2 = 15 с.
|
|
|
Рисунок 5.5 – Зависимость нормированной динамической погрешности от постоянной времени датчика а) в канале измерения концентрации вещества на входе в абсорбер; б) в канале измерения концентрации вещества на выходе из абсорбера. |
Использование модели для определения методической динамической погрешности [9] при существующих параметрах настройки компонентов измерительных подсистем АСУ ТП (Ts = 1 c, Tf1 = 300 с, Tf2 = 300 c, Tp1 = 0,5 c, Tp2 = 0,5 c) позволяет получить значение относительной методической динамической погрешности δд = ± 0,96 %, что составляет 30 % от статической погрешности измерения степени насыщения абсорбента.
При сохранении значения периода опроса датчиков (TS = 1 секунда), используя алгоритмы минимизации модели ошибки потерь эффективности системы измерения [9, 64], можно получить значения настроечных параметров (Tf1 = 400, Tf2 = 6 c, Tp1 = 9 c, Tp2 = 15 c), при которых относительная динамическая погрешность до δд = ± 0,03 %, что составляет 1 % от статической погрешности измерения степени насыщения абсорбента.
При увеличении периода опроса датчиков до Ts = 4 c и выборе значений настроечных параметров измерительной системы с использованием моделей погрешности [64] (Tf1 = 600 с, Tf2 = 10 c, Tp1 = 10 c, Tp2 = 15 c) методическая динамическая погрешность также может быть снижена до δд = ± 0,03 %.
Таким образом, определение значений настроечных коэффициентов измерительной системы по предложенным в работе [9, 64] математическим моделям позволяет снизить в 30 раз значение методической динамической погрешности измерения степени насыщения абсорбента, а также позволяет в 4 раза увеличить период опроса датчиков, что существенно уменьшает затраты процессорного времени управляющего контроллера.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 %.
%. %.
%. ,
,