Праворуч на голковій пластині 25 кріпиться стояк 32, в нього вставлений палець 33, який закріплюється упорним гвинтом 34.
В пальці 33 просвердлений ексцентричний отвір, в нього вставлена вісь 1, яка закріплена упорним гвинтом. На вісь 1 надіта гальмуюча пластина 2, яка слугує для запобігання зміщення тканини до працюючого в момент зворотного повороту витискувача. На палець 33 надіта пружина, один її кінець упирається в голкову пластину 25, другий – в гальмівну пластину 2, повертаючи її проти годинникової стрілки.
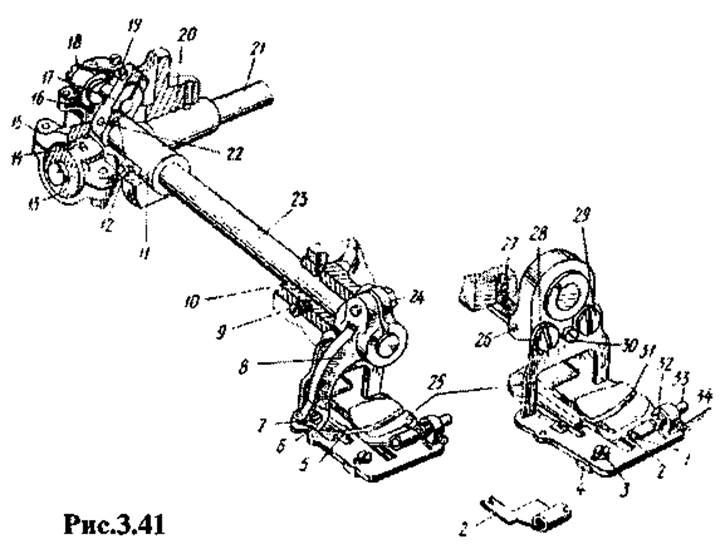
Якщо під дією ексцентрика 13 шатун 15 буде підійматися, то коромисло 17, вал 23 та голковод 8 повернуться проти годинникової стрілки, голка переміститься зліва направо.
Регулювання положення вушка голки 5 відносно ріжок петельника регулюють поворотом голковода 8 на валу 23 після послаблення болта 24. Величина ходу голки 5 регулюється поворотом пальця 18 всередині коромисла П після послаблення гвинта 19. Якщо центр пальця 18 повернути ближче до осі валу 23, то хід голки збільшиться. Голкову пластину 25 в невеликих межах можна регулювати по вертикалі та горизонталі. Перед виконанням регулювання послаблюють гвинти 27, 28, 29 та переміщують пластину 25. Положення гальмівної пластини 2 відносно витискувача регулюється поворотом пальця 33 після послаблення гвинта 34. Ширина підгинання матеріалу регулюється переміщенням лінійки-напрямляча 4 впоперек голкової пластини 25 після послаблення гвинта.
Механізм петельника. Петельник 12 (рис. 3.42) має два ріжки для захвату петлі голки та переносу її на лінію руху голки. Петельник здійснює складний просторовий рух в двох перпендикулярних площинах.
В кривошип 4, виготовлений разом зі сферичним ексцентриком механізму голки та закріплений установчим гвинтом на головному валу 5, загвинчується палець 2, в його отвір вставлений гніт та загвинчений гвинт 18, що захищає гніт від забруднення. На цей палець надівається муфта 19, в її бічному отворі упорним гвинтом 20 закріплюється вісь 3. На вісь надіта вилка 1, в її різьбову частину загвинчується важіль 7, який стягується гвинтом 6. До переднього кінця важеля 7 притискним гвинтом 13 прикріплюється петельник 12. На важелі 7 установчим гвинтом 17 закріплюється кульовий шарнір 16, який вкладається в опорну частину підвісного підшипника 9 та спереду закривається кришкою 15, яка прикріплена трьома притискними гвинтами 14 до підвісного підшипника 9. Підвісний підшипник 9 надівається на шарнірний циліндричний гвинт 8 загвинчений у вкладиш 10. Осі гвинта 8 та вкладиша 10 ексцентричні, при чому вкладиш 10 кріпиться в корпусі машини упорним гвинтом 11.
Якщо палець кривошипа 4 рухається по нижній або верхній частині кривошипного кола, то петельник буде рухатися в напрямку до працюючого або від нього; при русі пальця 2 по передній чи задній боковій частині кривошипного кола петельник 12 буде здійснювати зворотні рухи відносно опорної частини підвісного підшипника 9.
Регулювання положення петельника 12 відносно лінії руху голки відбувається його переміщенням вздовж важеля 7 після послаблення гвинта 13; якщо петельник потрібно перемістити в горизонтальному напрямку на більшу відстань відносно лінії руху голки, то після викручування гвинта 20 знімають вісь З, послаблюють гвинт 6 та вилку 1 провертають на парну кількість разів.
Петельник 12 можна регулювати відносно вушка голки в горизонтальному напрямку переміщенням вкладиша 10 вздовж його осі після послаблення гвинта 11.
Петельник 12 можна регулювати у вертикальному напрямку шляхом повертання вкладиша 10 після послаблення гвинта 11.
Механізм переміщення матеріалів. В машині застосований верхній рейковий механізм переміщення матеріалів. Зубчаста рейка здійснює еліпсоподібний рух над тканиною, а тканина притискається внизу до голкової частини двома лапками.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.