Определение допустимой длины конвейера, перемещающего груз по наклонной выработке вниз при углах наклона β > -40°. На таких конвейерах привод, как правило один и устанавливается в верхней части конвейера. Такие конвейеры называют тормозными. При холостом ходе конвейер работает в двигательном режиме. По мере увеличения загруженности конвейера, последний переходит в тормозной режим работы, при котором электродвигатель привода работает в генераторном режиме. Допустимую длину LD конвейера определяем в следующей последовательности.
а) Определяем абсолютное значение тормозного усилия (FН-С)LD привода
 Н (5.29)
Н (5.29)
Тормозное усилие (FН-С)LD создаётся электродвигателем привода при работе последнего в генераторном режиме и передаётся цепи через ведущую звёздочку. Тормозное усилие уравновешивает действие неуравновешенной составляющей веса груза грузовой ветви.
б) Выражаем (FН-С)LD через разность натяжений цепи в сбегающей с бегущей звёздочки грузовой ветви (Sсб) и набегающей на неё порожняковой ветви
![]()
где SСб>SНб по абсолютной величине при работе конвейера с расчётной нагрузкой в тормозном режиме.
в) Определяем абсолютное натяжение цепи в характерных точках контура, приняв за точку отсчёта минимальное натяжение в контуре цепи ( S2 = Smin = SП.Р).
г) Располагая абсолютными величинами натяжения цепи в характерных точках контура и решая совместно уравнения (5.24, 5.25, 5.29) относительно длины конвейера получаем
 (5.30)
(5.30)
В формуле (5.30) β1 = -β ; а β2 = β
5.3.7 Определение критической длины скребкового конвейера LК из условия возникновения резонанса в цепи
Тяговые цепи, как и все цепные передачи, отличаются неравномерностью движения, вызываемой периодическими изменениями мгновенного радиуса навивки на ведущую звёздочку (рис 5.7).
Неравномерность движения тяговых цепей сопровождается возникновением в них динамических усилий, величина которых при определённых условиях может оказаться соизмеримой с величиной статического натяжения цепей. Кроме того, динамические усилия вследствие их многократного (периодического) приложения к тяговым цепям приводят к усталостному разрушению последних. За период зацепления 2 одного зубца ведущей звёздочки с шарниром цепи изменяется скорость цепи и ускорение цепи в точках набегания на ведущую звёздочку и сбегания с неё. После момента времени начала зацепления в течение первого полупериода зацепления τ цепь движется ускоренно достигая в конце полупериода значения vmax. Во втором полупериоде цепь движется замедленно, снижаясь до величины vmax в конце периода зацепления. При этом в момент начала зацепления (точки 1, 2, 3, 4) мгновенно возрастает ускорение от отрицательного максимального значения (-amax ) до положительного максимального значения ( + amax ).
Мгновенное возрастание
ускорения представляет собой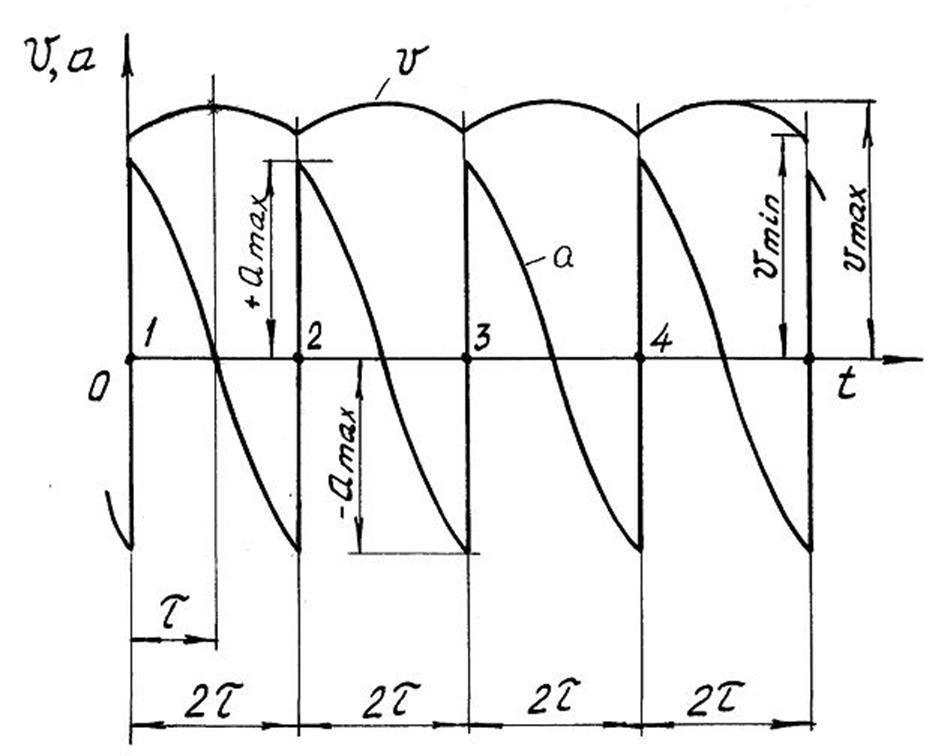
Рис 5.7 Графики изменения скорости цепи и ускорения в точках набегания на ведущую звёздочку и сбегания с неё:
v - скорость цепи (м/с); Q- ускорение цепи (м/с2); t - время (с); 2τ - период зацепления одного зубца звёздочки с шарниром цепи (с); τ- полупериод зацепления (с); 1, 2, 3, 4 - точки момента времени начала зацепления, в которые происходит динамический удар
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.