












Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«Кузбасский государственный технический университет»
Кафедра электропривода и автоматизации
ЭЛЕКТРИЧЕСКИЕ СИНХРОННЫЕ СИСТЕМЫ
ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
(СЕЛЬСИНЫ)
Методические указания к проведению лабораторной работы
по дисциплинам "Управление техническими системами"
и "Технические средства автоматизации" для студентов
специальностей 170500, 250100, 250400, 170100
Утверждены на заседании кафедры
Рекомендованы к печати
учебно-методической комиссией
специальности 170500
Электронная копия хранится
в библиотеке главного корпуса
ГУ КузГТУ
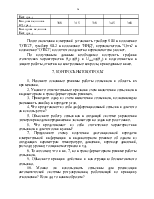
1. ЦЕЛЬ РАБОТЫ
Ознакомиться с принципом действия и устройством одной из аналоговых систем дистанционного контроля и управления – сельсинной. Получить экспериментально статические характеристики сельсинной передачи в различных режимах.
2. СОДЕРЖАНИЕ РАБОТЫ
1. Изучение настоящих методических указаний и размещенных на стенде технических средств.
2. Снятие статической характеристики сельсинной передачи в индикаторном режиме.
3. Снятие статической характеристики сельсинной передачи в трансформаторном режиме.
4. Составление отчета и подготовка к защите.
3. УКАЗАНИЯ К ОТЧЕТУ
Отчет составляется один для звена и должен содержать наименование работы, ФИО исполнителей, номер группы. В отчете должны быть представлены: две схемы сельсинной передачи, эксплуатируемые в индикаторном и трансформаторном режимах; таблица экспериментальных данных; характеристики, построенные на их основе.
Графики выполняются или на миллиметровой бумаге, или на развернутых листах в клеточку из ученической тетради.
4. ОБЩИЕ ПОЛОЖЕНИЯ
В устройствах автоматики нередко требуется дистанционное измерение углов поворота какого-либо механизма. Например, на электрической станции необходим дистанционный контроль положения различного рода задвижек и вентилей; на центральном посту управления шлюзом обязательно контролируют положение щитов, створок ворот, затворов наполнения камер; на щитке контрольных приборов самолета должны быть указатели положения рулей, шасси и др.; в следящих системах требуется измерение разности углов поворота двух осей – угла рассогласования.
Для дистанционного измерения угла применяют самосинхронизирующиеся синхронные передачи (сельсинные), работающие на однофазном токе [1, с. 34]. Под самосинхронизацией понимают способность приемного устройства при включении автоматически приходить из любого положения в согласованное, соответствующее углу поворота задающего устройства – датчика. Необходимость самосинхронизации обусловила использование именно однофазных машин, так как трехфазные указанным свойством в полной мере не обладают. Кроме того, из-за наличия вращающегося магнитного поля моменты в трехфазных машинах при смещении роторов по направлению вращения магнитного потока и против различны. Трехфазные машины используют лишь в системах синхронного вращения, называемых "электрическим валом", в которых для синхронизации вращения двух или более механизмов выравнивают нагрузки двигателей, создавая уравнительные моменты и передавая энергию с оси одного механизма на ось другого.
В устройствах измерения и передачи угла успешно используют индукционные однофазные машины – сельсины. Среди сельсинов различают сельсины-датчики, сельсины-приемники и дифференциальные сельсины [2, с. 58]. Первые два типа практически идентичны и отличаются лишь некоторыми конструктивными признаками. Сельсин-датчик и сельсин-приемник представляют собой электрические индукционные машины однофазного тока, у которых первичная обмотка – это обмотка возбуждения, а вторичных обмоток три, это обмотки синхронизации, расположенные в пространстве под углами 120°. Чтобы обеспечить самосинхронизацию, сельсины выполняют как двухполюсные машины.
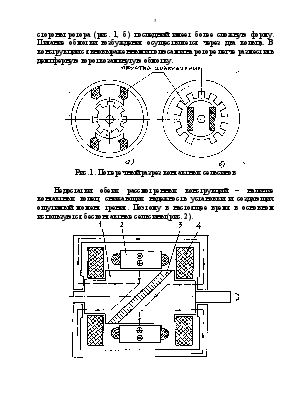
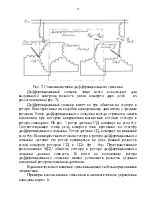
Сельсины по конструктивному исполнению разделяются на контактные и бесконтактные. Обмотка возбуждения может располагаться как на статоре, так и на роторе. Соответственно возможны две конструктивные формы контактных сельсинов (рис. 1). Обмотку возбуждения всегда выполняют сосредоточенной и располагают на явновыраженных полюсах, при размещении обмотки возбуждения на статоре (рис. 1, а) ротор сельсина имеет простую цилиндрическую форму, но снабжен тремя контактными кольцами, к которым подключены обмотки синхронизации. При возбуждении со стороны ротора (рис. 1, б) последний имеет более сложную форму. Питание обмотки возбуждения осуществляется через два кольца. В конструкции с явновыраженными полюсами на роторе легче разместить демпферную короткозамкнутую обмотку.
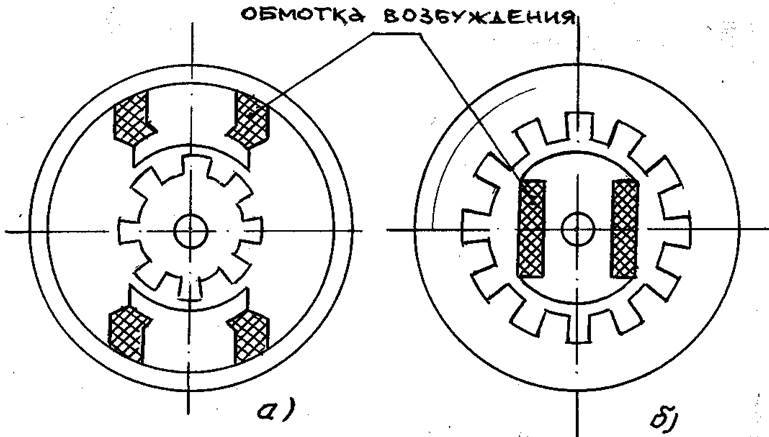
Рис. 1. Поперечный разрез контактных сельсинов
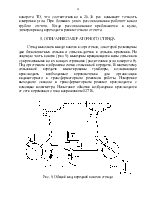
Недостатки обеих рассмотренных конструкций – наличие контактных колец, снижающих надежность установки и создающих ощутимый момент трения. Поэтому в настоящее время в основном используются бесконтактные сельсины (рис. 2).
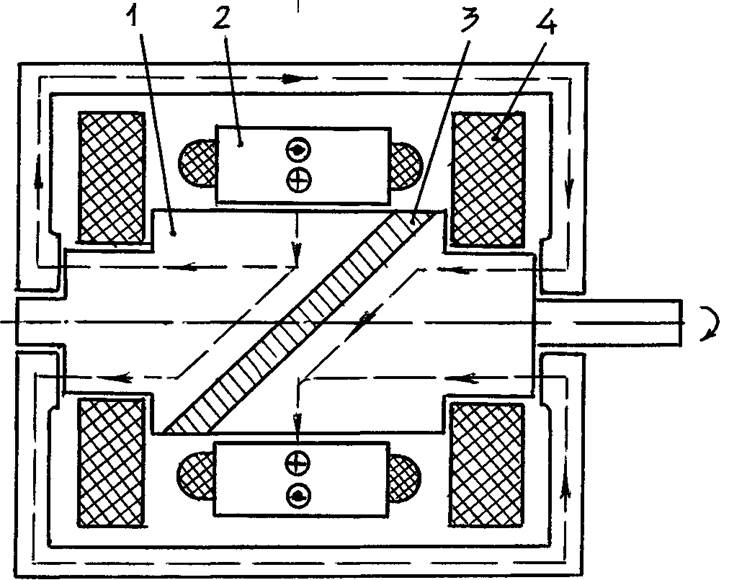
Рис. 2. Схема (продольный разрез) бесконтактного сельсина
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.