При малых углах рассогласования выходные напряжения обоих каналов уменьшаются, поэтому внутренние сопротивления диодов возрастают. При этом напряжения Uт.о и Uг.о приложены к соответствующим диодам. Следовательно, Uвых сельсинной пары определяется в основном напряжением Uт.о канала ТО. Недостатком схемы (рис. 6, в) является невозможность полного отключения каналов ТО при больших углах и ГО – при малых углах рассогласования.
Схема автоматического согласования с запирающими диодами (рис. 6, г) обеспечивает бесконтактную коммутацию на выходе сельсинной системы. Работа схемы основана на использовании выпрямительного моста UZ на диодах и бесконтактного полупроводникового коммутатора D. С помощью выпрямителя в схему подается запирающее напряжение Uз. При малых углах рассогласования Uз>Uг.о, поэтому коммутатор заперт и не пропускает сигнал ГО. На выход подается только напряжение канала ТО.
С увеличением угла рассогласования при Uг.о>Uз диоды
коммутатора отпираются и обеспечивают подключение канала ГО к выходу системы.
Резистор R3 ограничивает
сигнал ТО. Направление токов в положительный полупериод при подключении канала
ГО показано на
рис. 6, г.
Для согласования выходов сельсинных систем наряду с рассмотренными используют устройства на реле, неоновых лампах и т.п. Разновидностью сельсинов являются дифференциальные сельсины, используемые в качестве преобразователей разности или суммы двух углов, а также для введения дополнительных поправок в сельсинную трансформаторную схему.
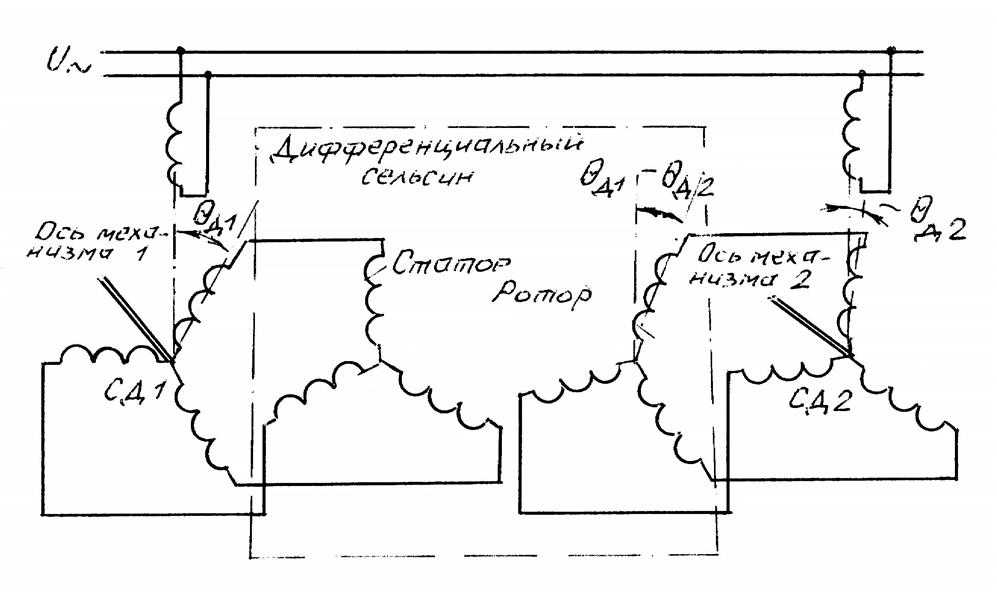
Рис. 7. Схема включения дифференциального сельсина
Дифференциальный сельсин чаще всего используют для визуального контроля разности углов поворота двух осей – их рассогласования (рис. 7).
Дифференциальный сельсин имеет по три обмотки на статоре и роторе. Конструктивно он подобен асинхронному двигателю с фазным ротором. Ротор дифференциального сельсина всегда стремится занять положение, при котором направления магнитных потоков статора и ротора совпадают. На рис. 7 ротор датчика СД1 повернут на угол qд1. Соответствующие этому углу поворота токи протекают по статору дифференциального сельсина. Ротор датчика СД2 повернут на меньший угол qД2. Взаимодействие потоков статора и ротора дифференциального сельсина заставит его ротор повернуться на угол, равный разности углов поворота роторов СД1 и СД2: qД1 – qД2. Пространственное расположение МДС обмоток статора и ротора дифференциального сельсина должно совпасть. В итоге по положению ротора дифференциального сельсина можно установить разность угловых положений роторов сельсинов-датчиков.
В динамическом отношении сельсины являются безынерционными элементами.
Примеры использования сельсинов в автоматическом управлении показаны на рис. 8.
Электродвигатели Д получают питание от управляемых преобразователей УП. Блоки У, управляющие преобразователями, включают в себя отрицательные обратные связи по току якоря и напряжению двигателей и соответствующие регуляторы и корректирующие устройства. Электроприводы построены по следящему принципу и автоматически отрабатывают заданные по технологическим условиям перемещения механизмов. Схема слежения имеет каналы грубого и точного отсчета, которые собраны соответственно на сельсинах ГО и ТО.
Электропривод механизма поворота осуществляет непрерывную обработку заданного угла α в забое. В одном из крайних положений механизма электропривод согласован по положению с одним из сельсинных датчиков СД1 или СД2 (рис. 8). При переключении переключателя П в другое положение электропривод отработает разность углов между СД1 и СД2, равную углу забоя α. При новом переключении П двигатель Д вновь отработает угол α, но в обратном направлении и т. д.
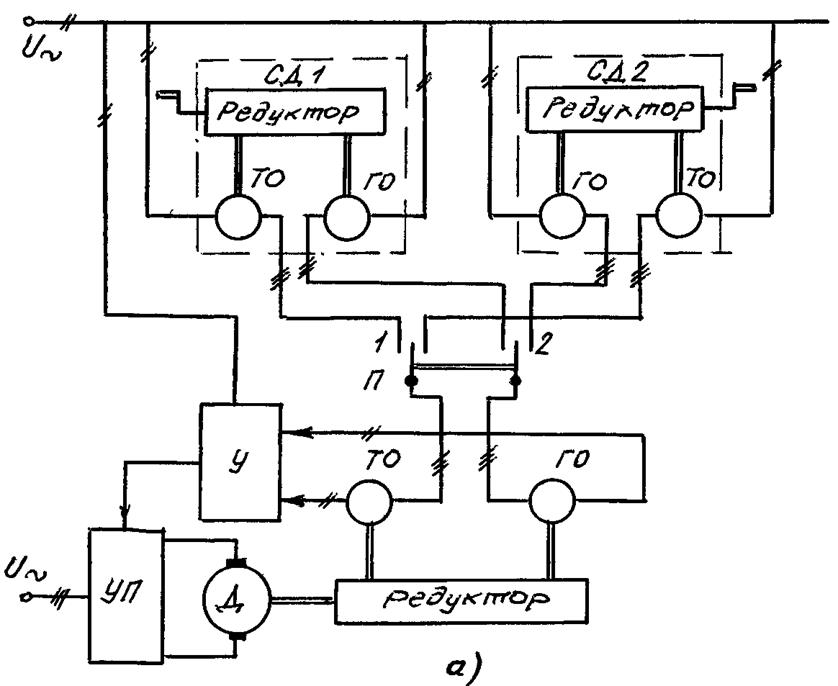
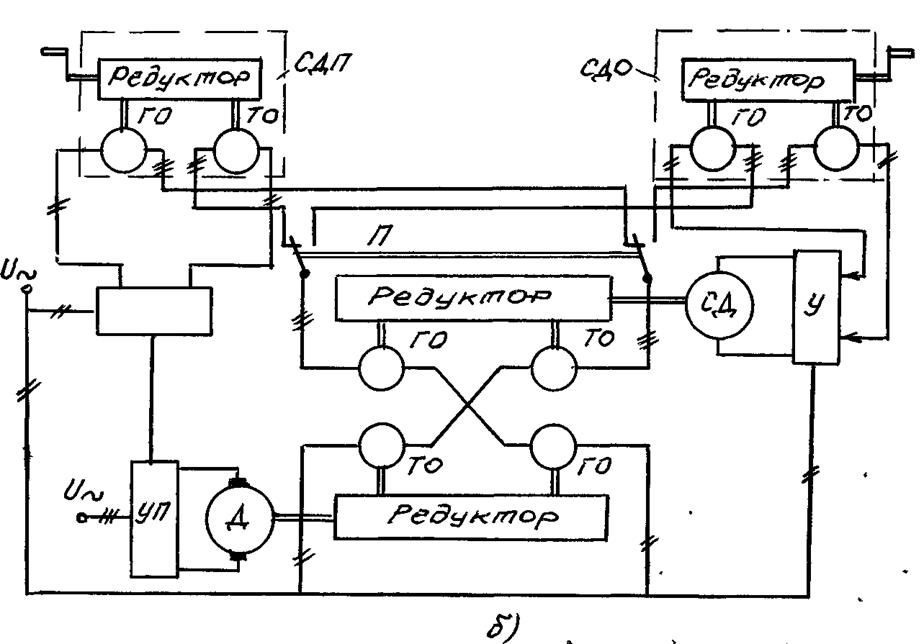
Рис. 8. Схема электроприводов с автоматической отработкой заданных угла поворота (а) и перемещения (б) роторного экскаватора
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.