










:Лабораторная работа №1![]()
![]() Способы
управления векторным преобразователем частоты вращения асинхронных электродвигателей.
Способы
управления векторным преобразователем частоты вращения асинхронных электродвигателей.
![]() Цель работы.
Цель работы.
Изучение возможностей частотного преобразователя серии DF-5 и освоение способов регулирования его параметров.
1. Общие сведения.
Асинхронный двигатель с автоматически управляемой частотой и амплитудой подводимого напряжения к статору двигателя позволяет по сравнению с двигателями постоянного тока позволяют обеспечить электроприводу более высокое быстродействие с относительно малыми потерями энергии в переходном режиме, а в установившемся режиме –плавное, в широком диапазоне регулирование скорости.
Экономические выгоды частотного управления синхронными двигателями особенно существенны для приводов повторно-кратковременного режима, для приводов с длительной нагрузкой и частыми реверсами, высокоскоростных механизмов (подьемно-транспортные устройства, продольно-строгальные, шлифовальные станки и другие высокоскоростные установки).В последнее время такие системы управления оборудованные датчиками скорости и контурами регулирования нашли широкое применение для поддержания заданной температуры жидкости в системах управления насосами. Использование регулируемого в широких пределах двигателя позволяет приблизить его по скорости вращения к рабочему механизму, и, как следствие, упростить кинематические связи, что позволяет механизмам реализовать более точно заданные требования.
Возможные методы регулирования частоты вращения асинхронных электродвигателей (n) могут быть определены из выражения:
![]()
![]() (
(![]() ) =
) = (
(![]() ) ,
) , ![]()
![]()
![]()
![]()
![]()
![]() (1.1)
(1.1)
где р-число пар полюсов в обмотке статора,![]()
![]()
![]() -cинхронная частота вращения, т.е. частота вращения
магнитного поля,
-cинхронная частота вращения, т.е. частота вращения
магнитного поля,
![]() -частота
переменного тока в сети,
-частота
переменного тока в сети,
s-скольжение, измеряемое в процентах или долях единицы:
s =
![]()
![]() (1.2)
(1.2)
Из выражения (1) следует, что частота вращения ротора n зависит от числа пар полюсов - p, cкольжения-s и частоты переменного тока-f![]() . Следовательно регулирование
частоты вращения возможно изменением любого из этих параметров.
. Следовательно регулирование
частоты вращения возможно изменением любого из этих параметров.
Регулирование скорости вращения двигателей изменением числа пар полюсов находит широкое применение в многоскоростных электроприводах, допускающих ступенчатое регулирование частоты вращения ( привода лифтов, станков, вентиляторов и т. п. ).
Достоинством этого способа регулирования является возможность обеспечения неизменного значения коэффициента полезного действия и коэффициента мощности двигателя при переходе из одной частоты на другую. Однако, повышенные габариты, сложность двигателя и коммутационной аппаратуры и, как следствие, высокая стоимость являются их недостатками.
Изменение (увеличение) скольжения двигателя, приводящее при неизменном нагрузочном моменте к уменьшению скорости вращения, возможно путем уменьшения подводимого к двигателю напряжения. Однако, при этом возрастает электрические потери в роторе, величина которых пропорциональна скольжению. Это приводит при работе на низких частотах к значительному снижению коэффициента полезного действия двигателя, увеличению потребляемого из сети тока и, как следствие, возможному перегреву двигателя
В последнее время широкое применение получил способ регулирования скорости вращения ротора асинхронного двигателя изменением частоты питающего напряжения – частотное регулирование. Это связано с успехами в развитии средств микроэлектроники и силовых полупроводниковых коммутирующих приборов и, в частности, IGBT-ключей, что позволило создать преобразователи частоты в приемлемых для применения массогабаритных характеристиках.
Упрощенное выражение для оценки максимального момента асинхронного двигателя (Мmax) при частотном регулировании имеет вид:
Мmax ![]() C
C ![]() ,
(1.3)
,
(1.3)
где С – постоянная для конкретного двигателя величина,
![]() -подводимое
к обмотке статора напряжение.
-подводимое
к обмотке статора напряжение.
Из этого выражения следует, что с изменением частоты питающего напряжения f1, меняется величина максимального момента, а следовательно его перегрузочная способность λ, равная отношению максимального момента к номинальному (М ном ):
![]()
 .
.![]()
![]() (1.4)
(1.4)
![]() Поэтому,
чтобы сохранить перегрузочную способность двигателя на требуемом уровне
необходимо одновременно с изменением частоты питающего напряжения f1 изменять и величину напряжения U1, подводимого к обмотке статора.
Поэтому,
чтобы сохранить перегрузочную способность двигателя на требуемом уровне
необходимо одновременно с изменением частоты питающего напряжения f1 изменять и величину напряжения U1, подводимого к обмотке статора.
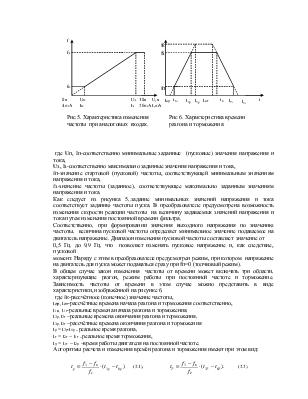
Характер одновременного изменения f1 и U1 зависит от вида графика изменения статического момента нагрузки (Мс). Если момент нагрузки постоянный , то напряжение U1 должно регулироваться пропорционально изменению частоты f1 в соответствии с выражением:
![]() U1 =
U1 = (1:5)
(1:5)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.