Аналогичным путем, выбирая для второго подокна вид характеристики bodemag и активизируя во втором столбце с названием Open-Loop: первые три окна-галочки с надписями справа LoopTransferL., PlantG, CompensatorC, можно во втором подокне построить амплитудно-частотные характеристики разомкнутого контура, объекта управления и регулятора. При этом окно средства просмотра примет вид, представленный на рис. 21.
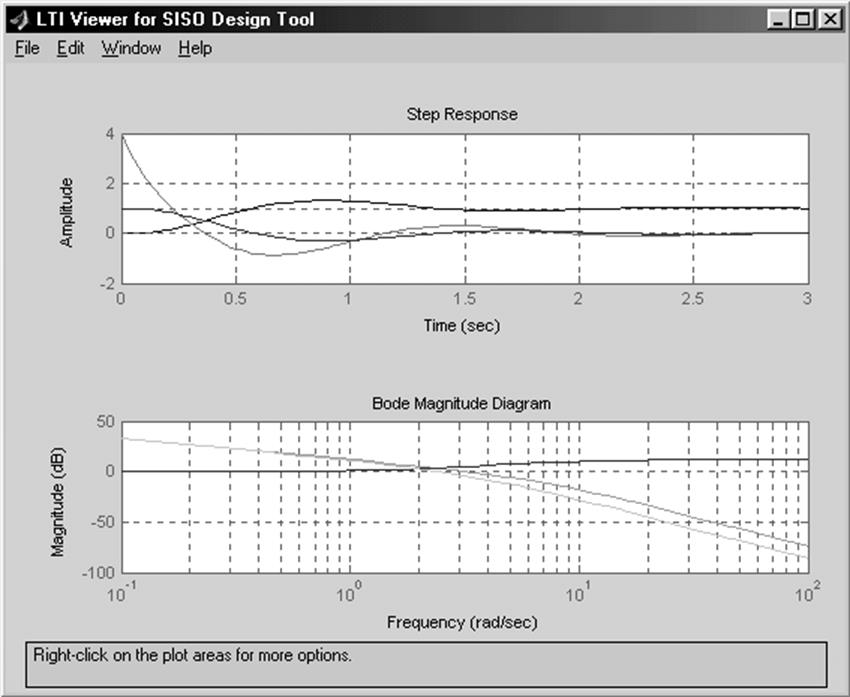
Рис. 21
Если вы хотите, чтобы в окне LTI Viewer for SISO Design Tool было изображено лишь подокно с амплитудно-частотными характеристиками, откройте окно Response Plot Setup, введите 2. none в первую строку панели Plots и нажмите кнопку OK. В результате из окнаLTIViewerforSISODesignToolбудет удалено подокно с изображением переходных характеристик.
Следует отметить, что окна средства LTIViewer forSISODesignTool, открываемые с помощью рассмотренных команд подменю LoopResponse, по своим функциональным возможностям несколько уступают основному окну средства просмотра LTIViewer[1,2] и являются как бы версией последнего.
Однако у вас имеется возможность открыть основное окно средства LTI-Viewerдля более полного анализа характеристик проектируемой системы, используя команду NewViewer(открыть новое основное средство просмотра) из меню File окна LTIViewer forSISODesignTool, отображающего одну из характеристик проектируемой системы, например переходную характеристику
(Step) замкнутой системы (рис.17). Однако если вы открываете окно основного
средства просмотра LTIViewer, то тем самым теряете динамическую связь между этим окном и окном средства SISOTOOL.
Это означает, что новые изменения, вносимые в структуру и параметры проектируемой системы, уже не будут отражаться на форме характеристик, отображаемых в окне средства просмотра LTIViewer.
Вопросы построения временных и частотных характеристик систем управления подробно изложены в приложении B.
7. ВЫБОР ГРАНИЦ ЖЕЛАЕМОЙ ОБЛАСТИ РАСПОЛОЖЕНИЯ ПОЛЮСОВ ПРОЕКТИРУЕМОЙ СИСТЕМЫ
Синтез (проектирование) регуляторов с помощью
корневого годографа [4,5] прежде всего предусматривает определение (выбор)
желаемой области расположения полюсов проектируемой системы исходя из требований,
предъявляемых к качеству её переходного процесса. Обычно эти требования формулируются
в виде допустимых значений перерегулирования ![]() и
времени переходного процесса
и
времени переходного процесса ![]() [4,5]. Выбирая
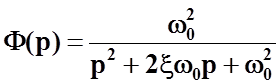
как желаемую двухполюсную систему с передаточной функцией
[4,5]. Выбирая
как желаемую двухполюсную систему с передаточной функцией
и
используя формулы [4,5]![]()
![]()
 ,
,
связывающие
показатели качества желаемой системы (время переходного процесса ![]() при 2 % допустимой ошибки и
перерегулирование
при 2 % допустимой ошибки и
перерегулирование ![]() ) и её параметры
) и её параметры ![]() и
и ![]() ,
нетрудно найти желаемые значения относительного коэффициента затухания
,
нетрудно найти желаемые значения относительного коэффициента затухания ![]() и собственной частоты колебаний
и собственной частоты колебаний ![]() , обеспечивающих выполнение
требований, предъявляемых к качеству проектируемой системы. Действительно,
приравнивая
, обеспечивающих выполнение
требований, предъявляемых к качеству проектируемой системы. Действительно,
приравнивая ![]() и
и ![]() ,
находим
,
находим ![]() . Затем, полагая
. Затем, полагая ![]() =
=![]() ,
определяем желаемые значения степени устойчивости (быстродействия)
,
определяем желаемые значения степени устойчивости (быстродействия) ![]() и собственной частоты
и собственной частоты ![]() двухполюсной системы:
двухполюсной системы:
![]() =
= ![]() ,
,
![]() =
= .
.
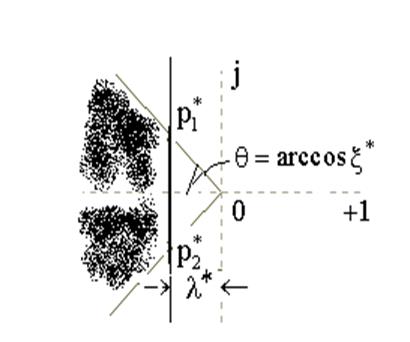
При этом полюсы желаемой системы

представить в виде точек на комплексной плоскости p (рис. 22), которая является также плоскостью корневого годографа.
 После определения
полюсов
После определения
полюсов ![]() строятся
границы области желаемого расположения других (недоминирующих) полюсов
проектируемой системы следующим образом:
строятся
границы области желаемого расположения других (недоминирующих) полюсов
проектируемой системы следующим образом:
а) через полюсы ![]() желаемой системы проводится вертикальная линия,
отстоящая от мнимой оси на расстояние, равное желаемому значению степени
устойчивости
желаемой системы проводится вертикальная линия,
отстоящая от мнимой оси на расстояние, равное желаемому значению степени
устойчивости ![]()
![]() проектируемой
Рис. 22 системы. Если все полюсы
проектируемой системы будут расположены на и левее этой прямой, то время
переходного процесса такой системы не будет превышать допустимой
величины
проектируемой
Рис. 22 системы. Если все полюсы
проектируемой системы будут расположены на и левее этой прямой, то время
переходного процесса такой системы не будет превышать допустимой
величины ![]() ;
;
б) из начала координат через полюсы ![]() желаемой системы проводятся два луча, составляющие
углы
желаемой системы проводятся два луча, составляющие
углы ![]() с мнимой осью. Если двухполюсная
система будет содержать полюсы в области, ограниченной этими лучами, то её
перерегулирование не будет превышать заданного значения
с мнимой осью. Если двухполюсная
система будет содержать полюсы в области, ограниченной этими лучами, то её
перерегулирование не будет превышать заданного значения ![]() .
Относительно систем более высокого порядка, к которым, как правило, принадлежит
проектируемая система, можно только предполагать, что расположение всех её
полюсов внутри области, ограниченной упомянутыми лучами, обеспечит желаемую
колебательность (желаемое перерегулирование).
.
Относительно систем более высокого порядка, к которым, как правило, принадлежит
проектируемая система, можно только предполагать, что расположение всех её
полюсов внутри области, ограниченной упомянутыми лучами, обеспечит желаемую
колебательность (желаемое перерегулирование).
В этом случае на величину перерегулирования влияет также расположение нулей и недоминирующих полюсов проектируемой системы. Однако во многих случаях эта гипотеза подтверждается. Поэтому за желаемую область расположения полюсов проектируемой системы обычно принимают область, ограниченную двумя лучами и вертикальной прямой, проходящими через желаемые доминирующие полюсы. На рис. 22 эта область окрашена с помощью разбрызгивателя.
Средство SISOTOOL позволяет
автоматически строить границы желаемой области расположения полюсов замкнутой
проектируемой системы, опираясь на желаемые значения времени переходного
процесса ![]() и перерегулирования
и перерегулирования ![]() или, что
эквивалентно, относительного коэффициента затухания
или, что
эквивалентно, относительного коэффициента затухания ![]() .
.
7.1.
Чтобы построить границы желаемой области расположения полюсов проектируемой
системы, определяемые значениями ![]() и
и ![]() /
/![]() :
:
а) вызовите меню правой клавиши мыши в графическом окне корневого годографа RootLocusEditor(C) и выберите команду New (новая граница) из подменю Design Constraints(построить границы желаемой области расположения полюсов проектируемой системы). Появляется диалоговое окно NewConstraint [выбираемые параметры (опции) границ] (рис. 23), в котором по умолчанию в текстовом окне с названием ConstraintType (вид ограничения) высвечивается SettlingTime (время переходного процесса);

Рис. 23
б) введите желаемое значение времени переходного
процесса ![]() в текстовое окно SettlingTime<(желаемое время переходного процесса), находящиеся
в поле Constraint Parameters(граничное
значение параметра);
в текстовое окно SettlingTime<(желаемое время переходного процесса), находящиеся
в поле Constraint Parameters(граничное
значение параметра);
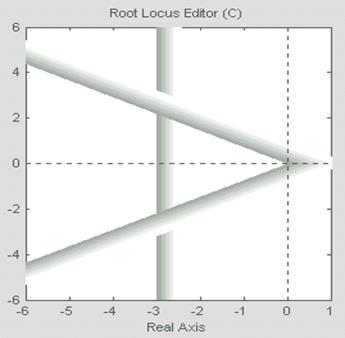 в) нажмите кнопку OK. На
плоскости корневого годографа появляется
в) нажмите кнопку OK. На
плоскости корневого годографа появляется
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.