![]()
для положительных углов перекладки по формуле 48, [1]
![]() ,
,
где k – порядковый номер зоны.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;![]()
![]() ;
;
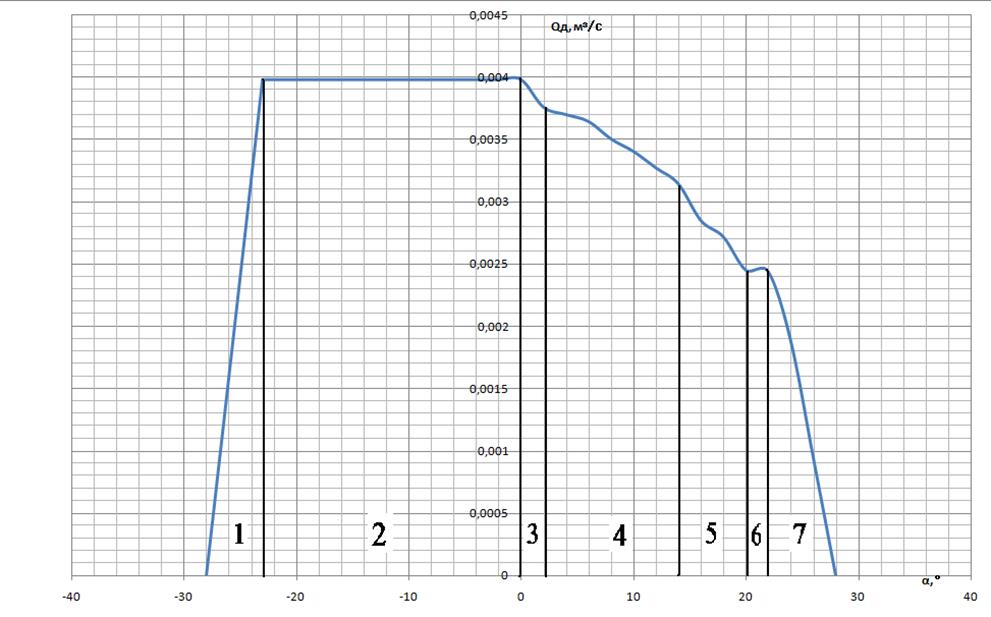
Рисунок 15.
Вычисляю объем рабочей жидкости V, перекачиваемой в пределах k-той зоны по формуле 49, [1]
По приведенной формуле рассчитываю объем рабочей жидкости для каждой зоны, полученные данные заношу в таблицу 13.
Привожу пример расчета для зоны 1

Определяю
среднее значение действительной производительности ![]() в
пределах k-той зоны по диаграмме
действительной производительности
в
пределах k-той зоны по диаграмме
действительной производительности ![]() , данные заношу в
таблицу 13.
, данные заношу в
таблицу 13.
Определяю время перекладки руля t в пределах k-той зоны по формуле 50 приведенной в [1]
По приведенной формуле рассчитываю время перекладки для каждой зоны, полученные результаты заношу в таблицу 13.
Привожу пример расчета для зоны 1.
Таблица 13.
|
k |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
lk |
0,077209 |
0,305622 |
0,025143 |
0,154373 |
0,082542 |
0,02884 |
0,091932 |
|
Vk |
0,0048487 |
0,019193 |
0,0015789 |
0,0096946 |
0,0051836 |
0,0018111 |
0,0057733 |
|
Qсрдk |
0,00199 |
0,00398 |
0,003865 |
0,003435 |
0,002785 |
0,00247 |
0,001245 |
|
tk |
2,4365 |
4,8223 |
0,4085 |
2,8223 |
1,8612 |
0,7332 |
4,6372 |
Условием проверки привода на время перекладки является выражение 51, приведенное в [1]
![]()
где

- суммарное время перекладки руля в пределах ![]() зоны.
зоны.
![]() - нормированное Правилами
Российского Морского Регистра Судоходства время перекладки руля.
- нормированное Правилами
Российского Морского Регистра Судоходства время перекладки руля.
Время
![]() определяю по формуле 52, приведенной в [1]
определяю по формуле 52, приведенной в [1]
 .
.
На
основании того, что суммарное время перекладки руля в пределах ![]() зоны не превышает нормированное
Правилами Российского Морского Регистра Судоходства время перекладки руля,
делаю заключение, что рассчитываемый привод проверку на время перекладки
проходит успешно.
зоны не превышает нормированное
Правилами Российского Морского Регистра Судоходства время перекладки руля,
делаю заключение, что рассчитываемый привод проверку на время перекладки
проходит успешно.
Проверка приводного двигателя осуществляется методом сопоставления потерь для 30 минутного режима непрерывных перекладок руля с борта на борт при полном переднем ходе судна, в этом случае определяю номинальные потери мощности двигателя по формуле 53, [1]
 .
.
где ![]() - номинальное значение КПД
двигателя, определяемое по графику зависимости
- номинальное значение КПД
двигателя, определяемое по графику зависимости ![]() для
для
![]() , приведенного на рисунке 8, [1];
, приведенного на рисунке 8, [1]; ![]() - для двигателя АМ 101-6 определяю
по таблице 10, [1]
- для двигателя АМ 101-6 определяю
по таблице 10, [1] ![]() - номинальная мощность
приводного двигателя.
- номинальная мощность
приводного двигателя.
![]()
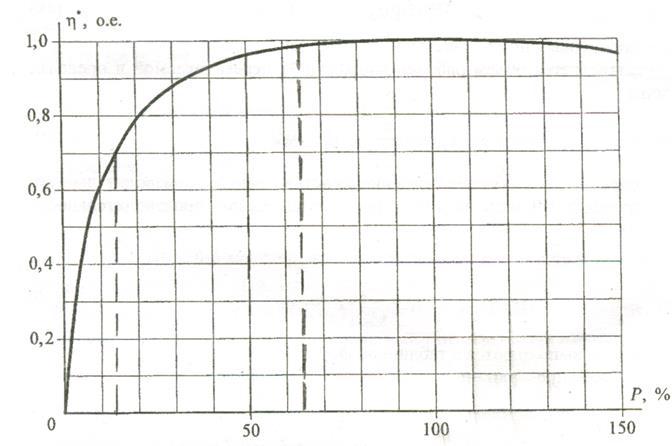
Рисунок 16. Определение ![]() по графику зависимости
по графику зависимости ![]() , приведенному на рисунке 8, [1].
, приведенному на рисунке 8, [1].
Разбиваю
энергетическую характеристику ![]() , приведенную на
рисунке 14 на 3 зоны.
, приведенную на
рисунке 14 на 3 зоны.
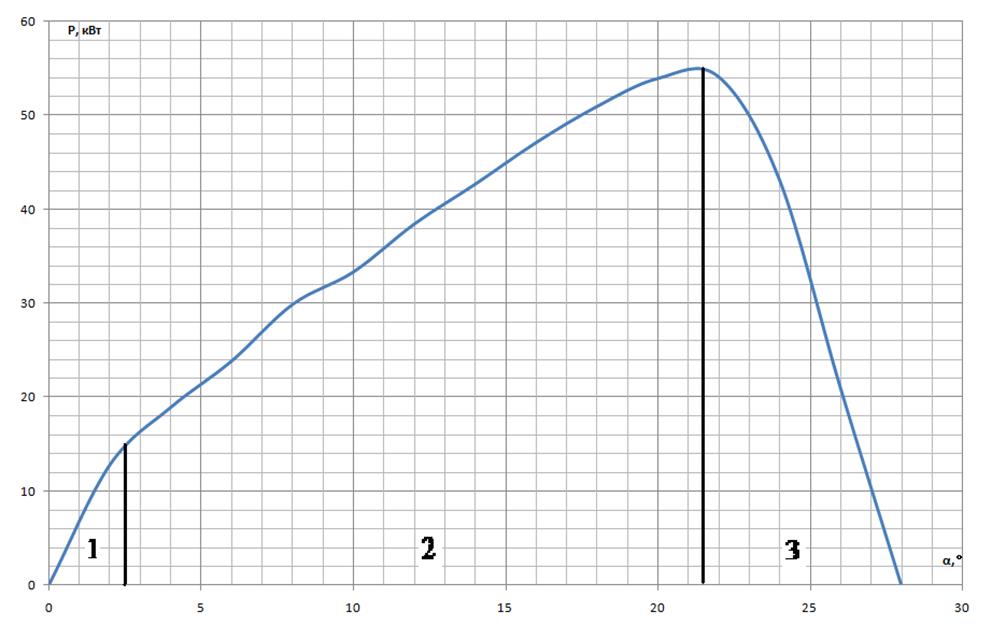
Рисунок 17.
Для
каждой зоны нахожу среднее значение ![]() мощности и заношу
в таблицу 14.
мощности и заношу
в таблицу 14.
Определяю
потери в пределах k-й зоны по формуле 54,
приведенной в [1]  ,
,
где
![]() - значение КПД двигателя в пределах k-й зоны, определяемое по графику
на рисунке 16.
- значение КПД двигателя в пределах k-й зоны, определяемое по графику
на рисунке 16.
Значение КПД двигателя определяю по формуле 55, приведенной в [1]
![]()
Полученные значения заношу в таблицу 14.
Таблица 14.
|
k |
1 |
2 |
3 |
|
Pk, кВт |
7,5 |
35 |
27,5 |
|
P, % |
13,64 |
63,64 |
50 |
|
η* |
0,7 |
0,985 |
0,96 |
|
η |
0,609 |
0,857 |
0,8352 |
|
ΔPk, кВт |
4,81 |
5,84 |
5,426 |
Условием проверки двигателя на нагрев является выражение 56, приведенное в [1]
 ,
,
где
![]() - число циклов перекладки руля за 30
минут, определяю по формуле 57, приведенной в [1]
- число циклов перекладки руля за 30
минут, определяю по формуле 57, приведенной в [1]
где
![]() - время перекладки руля в пределах
- время перекладки руля в пределах ![]() .
.
![]()
![]()
Условием проверки приводного двигателя на перегрузочную способность является неравенство 58, приведенное в [1].
![]() ,
,
где ![]() - максимальное значение момента
сопротивления на валу приводного двигателя, определяю по рисунку 12;
- максимальное значение момента
сопротивления на валу приводного двигателя, определяю по рисунку 12; ![]() - критический момент, определяю по
рисунку 6.
- критический момент, определяю по
рисунку 6.
![]() следовательно, делаю вывод, что
привод проверку на перегрузочную способность проходит.
следовательно, делаю вывод, что
привод проверку на перегрузочную способность проходит.
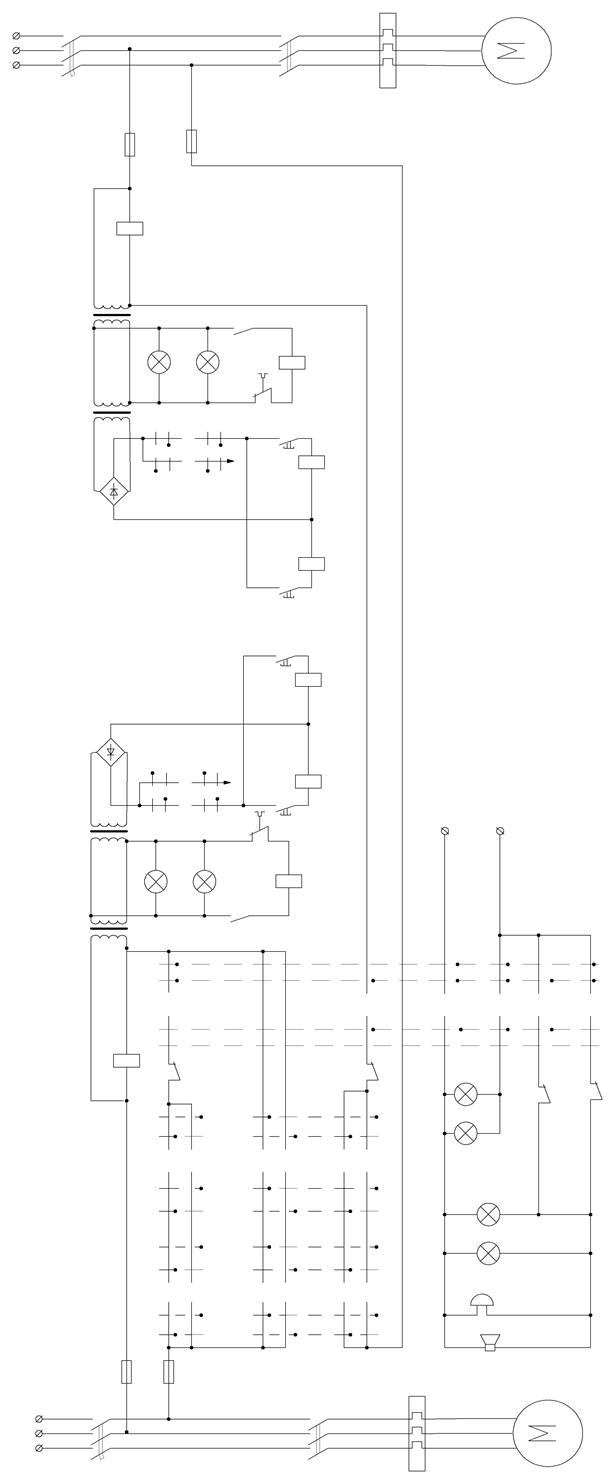
Схему разрабатываю на основе типовой, приведенной в [2], при разработке учитываю требования Российского Морского Регистра Судоходства,.
В работе может находиться любой насос в отдельности или оба одновременно. Дистанционный пуск электродвигателя М1 осуществляется переключением SA1 и SA3 из машинного или румпельного отделения. Одновременно с вводом в работу М1 нижними секциями переключателей SA1 и SA3 подготавливается электрическая линия автоматического запуска М2.
Защита от короткого замыкания реализована в виде автоматического воздушного выключателя QF1.
Переключателем SA5 может быть избран ручной, простого действия или автоматический режим управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.