|
|
|
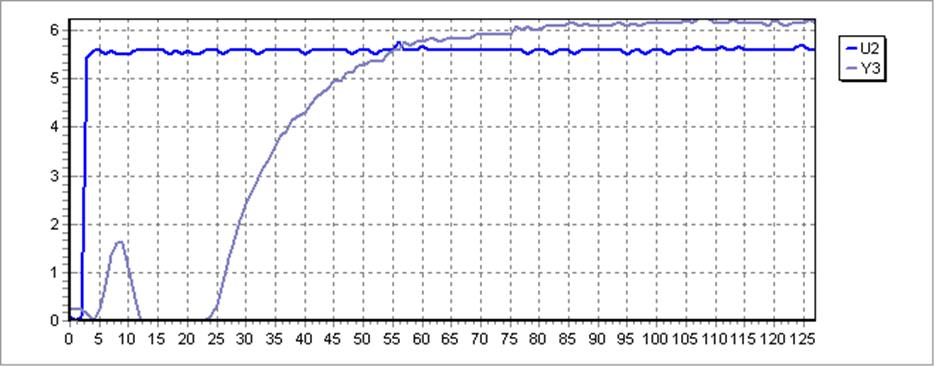
Рис. 29. График зависимости выходной величины Y3 от входной величины U2 |
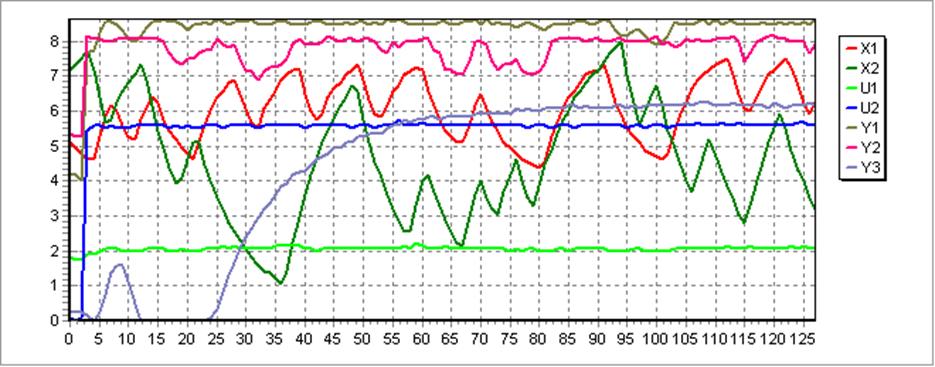
Из приведенных графиков видно, что при изменении одной из входных величин изменяются несколько выходных. Следовательно, объект является многосвязным. Так же из проведенных экспериментов можно сделать вывод о линейной зависимости выходных величин от входных в пределах исследуемого интервала. Следовательно, в исследуемой области объект является линейным.
4.1.2. Исследование стационарности объекта.
Объект является стационарным, если его параметры не изменяются с течением времени.
Произведем дважды снятие данных при одинаковых входных воздействиях (данные peregrev.i5, peregrev.i6). Интервал между снятиями данных составляет 1 час.
|
|
|
Рис. 30. Результаты при первом снятии данных. |
|
|
|
Рис. 31. Результаты при повторном снятии данных. |
При первом снятии данных М(Y1) = 5.24; M(Y2) = 5.34; M(Y3) = 2.39; при повторном снятии данных М(Y1) = 5.23; M(Y2) = 5.31; M(Y3) = 2.37. Таким образом, данные экспериментов различаются незначительно и, следовательно, объект можно считать стационарным.
4.1.3 Исследование характера изменения контролируемых, но не управляемых в режиме нормальной эксплуатации возмущений.
Случайной называется такая функция, значение которой при данном значении аргумента является случайной величиной. Каждая конкретная функция, которая может быть зарегистрирована при одном наблюдении, называется реализацией случайной функции. В данном случае аргументом случайной функции является время t, и в этом случае она называется случайным процессом.
Произведем дважды снятие данных и сравним полученные реализации процессов (данные peregrev.i7, peregrev.i8).
|
|
|
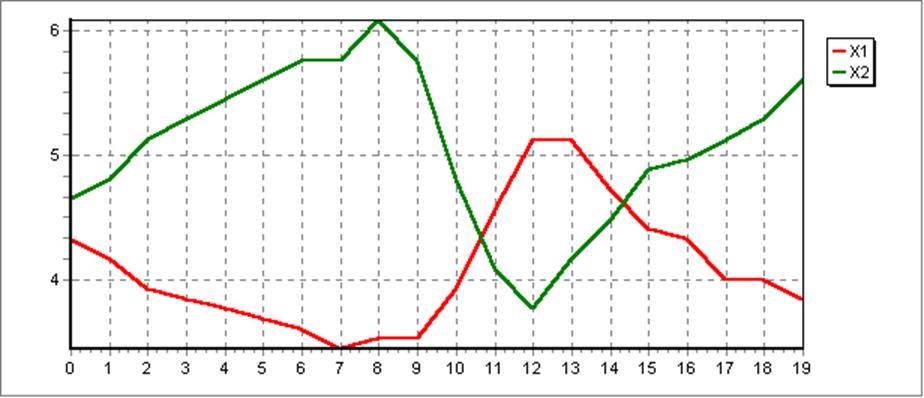
Рис. 32. График зависимости входных величин X1, X2 от времени в режиме НЭ. |
|
|
|
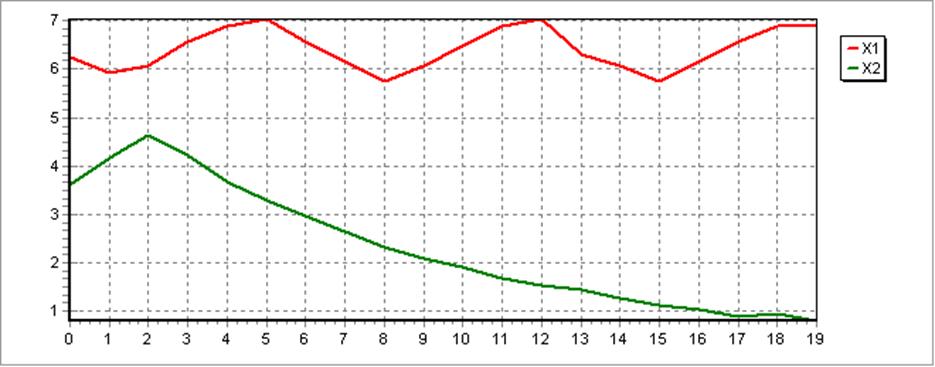
Рис. 33. График зависимости входных величин X1, X2 от времени в режиме НЭ. |
Из графиков видно, что в режиме НЭ входные величины X1, X2 являются случайными функциями времени, т.к. при одном и том же значении времени наблюдаются различные значения исследуемых функций. Т.о. характер изменения контролируемых, но не управляемых в режиме НЭ возмущений случайный.
4.1.4. Исследование наличия случайных неконтролируемых переменных (данные peregrev.i6).
|
|
|
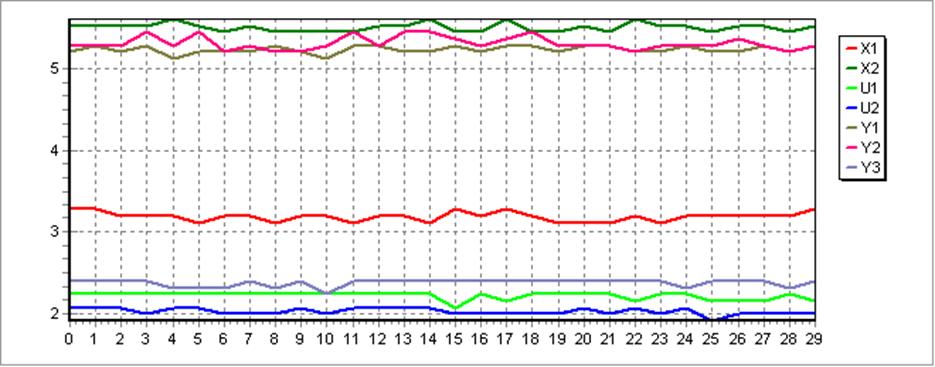
Рис. 34. График зависимости выходных величин от времени при неизменных входных воздействиях. |
Как видно из графиков, при фиксированных входных воздействиях выходные величины претерпевают незначительные изменения. Это говорит о присутствии случайных неконтролируемых возмущений. В реальном ТОУ их наличие связано с действием большого количества неучтённых факторов, изменением характеристик объекта во времени, и т. п.
4.1.5. Выявление связей выходных и входных переменных.
Из графиков рис. 6 – 29 видно:
¨ Y1 и Y2 зависят от всех входных переменных, т.е. имеются статические связи (выходные величины изменяются сразу же с изменением входных величин);
¨ Y3 зависит от U2 и эта связь динамическая (выходная величина изменяется с задержкой относительно изменения входной величины);
¨ с увеличением X1 Y1 и Y2 увеличиваются;
¨ с увеличением X2 Y2 увеличивается, а Y1 уменьшается;
¨ с увеличением U1 Y1 и Y2 увеличиваются;
¨ с увеличением U2 Y1, Y2 и Y3 увеличиваются.
Для исследования свойств динамической связи Y3 от U2 поставим следующий эксперимент: подвергнем ТОУ скачкообразному входному воздействию по переменной U2 и зафиксируем картину переходного процесса (данные peregrev.i17):
|
|
|
Рис. 35. График изменения переменных с течением времени. |
|
|
|
Рис. 36. Переходной процесс Y3 при скачкообразном воздействии по U2. |
При решении разнообразных задач анализа и синтеза систем управления возникает необходимость в описании (моделировании) свойств ТОУ. Если при описании опираться на свойства составляющих элементов, то часто получаются сложные модели. Упрощения можно добиться, если, не вникая во внутреннюю структуру ТОУ, характеризовать его как единое целое и моделировать связь между его входными и выходными процессами. Такая модель не вскрывает особенностей процессов, происходящих в объекте при функционировании. Однако получаемая с ее помощью связь между входом и выходом объекта образует совокупность тех соотношений, которые достаточны для проектирования системы управления. Модель, описывающая эту связь, характеризует свойства объекта при некоторых предположениях либо при определенных диапазонах изменения входного и выходного процессов
Исходя из проведенных экспериментов и полученных данных, можно построить следующую качественную блок-схему ТОУ:
|
|
|
Рис. 37. Блок-схема ТОУ. |
Эффективность управления объектом определяется его ТЭП. В качестве 2 технико-экономических показателей из прикладного программного обеспечения выберем математическое ожидание и дисперсию давления пара (переменной Y2). Давление пара должно поддерживаться на постоянном уровне, так как снижение давления ведет к уменьшению экономичности турбины, а при значительном понижении турбина не развивает полной мощности. Повышение давления ведет к увеличению напряжения в трубах и коллекторах.
В качестве критерия оптимальности управления (соотношения, характеризующего работу ТОУ) выберем максимум паропроизводительности парогенератора (переменной Y1), т. к. ее увеличение ведет к повышению экономической рентабельности эксплуатации ТОУ.
На данном этапе производится предварительная разработка функционально-алгоритмической структуры, выбор комплекса технических средств, анализ системных аналогов
Для оптимизации выбранных ТЭП ручное управление может осуществляться по следующему алгоритму:
|
|
|
Рис. 38. Алгоритм ручного управления ТОУ. |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.