Пример
6.3. Построить кривую ![]() (двухлепестковая
роза).
(двухлепестковая
роза).
Решение. Составим таблицу и в соответствии с ней построим график (рис. 6.6).
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
j |
0 |
|
|
|
p |
|
|
|
2p |
|
2j |
0 |
|
p |
|
2p |
|
3p |
|
4p |
|
r |
0 |
1 |
0 |
–1 |
0 |
1 |
0 |
–1 |
0 |
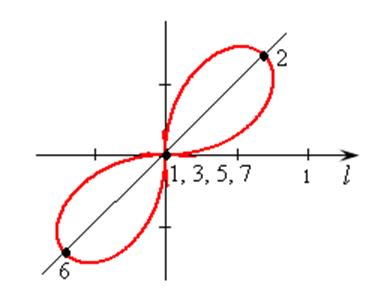
Рис. 6.6
Здесь те значения j, при которых ![]() , не рассматривались. Легко
догадаться, что график
, не рассматривались. Легко
догадаться, что график ![]() , или
, или ![]() , будет иметь k лепестков.
, будет иметь k лепестков.
Связь между полярной и декартовой системами координат устанавливается просто, если совместить полюс и начало координат, полярную ось и ось абсцисс, и уравнять масштабы (рис. 6.7).
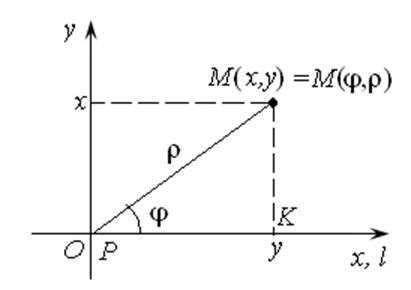
Рис. 6.7
В треугольнике OMK ![]() ,
, ![]() ,
тогда
,
тогда
![]() и
и  .
(6.7)
.
(6.7)
Это два равенства выражают r и j через x и y. С другой стороны
 или
или  (6.8)
(6.8)
Эти два равенства выражают x и y через r и j.
Например, уравнение ![]() в
декартовой системе координат запишется так:
в
декартовой системе координат запишется так:
 ,
,
или
 ,
,
т.е. в полярной системе оно имеет компактный вид. Мы будем переходить из системы в систему всегда, когда это облегчает какое-то действие.
Рассмотрим пространство векторов и основные действия с ними по той же цепочке «понятие – определение – действия», которую мы использовали и в матрицах, и в определителях.
Определение 6.1. Вектором называется направленный отрезок на плоскости.
Обозначается вектор одним из следующих способов: 1)
двумя буквами, например, ![]() или АВ
или 2) одной буквой, например,
или АВ
или 2) одной буквой, например, ![]() , а.
Длина вектора называется его модулем и обозначается, например,
, а.
Длина вектора называется его модулем и обозначается, например, ![]() или
или ![]() .
.
Множество векторов, с определенными над ними операциями, называется пространством векторов. Особую роль играют нуль-вектор и единичный вектор.
Нуль-вектор О – это вектор, модуль которого равен нулю, а направление неопределенно.
Единичный вектор е – это вектор, модуль которого равен единице, а направление произвольно.
Определение 6.2. Два вектора АВ и СD называются равными, если: 1) они параллельны, 2) их модули
равны и 3) направления совпадают. Тогда пишут векторное равенство АВ
= СDили![]() .
.
Поскольку здесь не сказано, на каких именно параллельных прямых лежат эти векторы, можно взять любые, а, значит, перенос вектора параллельно самому себе не изменит его величины и направления. Этим обстоятельством пользуются достаточно широко, перенося векторы параллельно себе в любую точку не только плоскости, но и пространства.
Если первые два условия равенства векторов выполнены, а последнее – нет, векторы называются противоположными: АВ = –СD.
Если первое и третье условие выполнены – векторы называют параллельными или пропорциональными: АВ = kСD
Простейшие действия над векторами: сложение, вычитание, умножение на число, скалярное произведение двух векторов.
 |
Рис. 6.8 Рис. 6.9
Свойства суммы векторов:
1) а+ b = b +а,
2) а+ 0 = а,
3) а+(–а) = 0,
4) (а+в)+с = а+(в+с).
2. Разность векторов а – b можно ввести как сумму векторов а + (–b), (правило меньшей диагонали (рис. 6.9).
3. При умножении вектора на число k, его модуль меняется в |k| раз, направление остается прежним, если k > 0 , и меняется на противоположное, если k < 0.
4. Скалярным произведением двух векторов называется число (скаляр), равное произведению модулей этих векторов и косинуса угла между ними.
![]() . (6.9)
. (6.9)
Свойства скалярного произведения:
1) (а×b) = (b×а),
2) (а×kb) = k(а×b),
3) (а + b) с=а×с+ b×с,
4) (а×0)=0,
5) (а×b) = 0, если а = 0, или b = 0, или cos(a,b) = 0.
После того, как векторы поместили в Декартову систему координат, потребовались еще два определения.
Определение 6.3. Проекциями вектора на ось ОХ
и ось ОY называются разности соответствующих координат его
начала и конца: ![]() ,
, ![]() .
.
Чтобы показать отличие координат вектора от координат точек, Декарт предложил соотнести их с единичными векторами, лежащими на осях координат – i и j.
Определение 6.4. Произведение проекции вектора на единичный вектор называется составляющейвектора на ось:
![]() ,
, ![]() .
.
С учетом всей информации вектор и его модуль можно описывать с помощью координат следующим образом:
![]() (6.10)
(6.10)
– это выражение называется разложением вектора в базисе i, j;
 (6.11)
(6.11)
– модуль вектора;
![]() (6.12)
(6.12)
– вектор в координатной форме.
Эти три формулы однозначно определяют вектор в Декартовой системе координат. Именно они положили начало векторной алгебре.
Векторы i и j называются ортами. Их модули равны единице, они направлены в положительном направлении осей координат.
С введением декартовой системы координат все действия над векторами передались их представителям – координатам, то есть числам. Это очень облегчило жизнь. В новой трактовке основные определения стали звучать так:
Нуль-вектор – это вектор, координаты которого равны нулю 0 (0,0).
Два вектора равны, если равны их соответствующие координаты:
![]() .
.
Для того чтобы сложить два вектора, нужно сложить их координаты. Это действие очень напоминает действие сложения матриц, где вектор – это матрица-строка, или матрица-столбец, записанные так:
а (а, b, с) + b (l, m, n) = (а+b) (а+l, b+m, с+n). (6.13)
Разность векторов, произведение вектора на число вводится аналогично: их координаты вычитаются и умножаются на число.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.