
 |
 |
 |
 |
 |
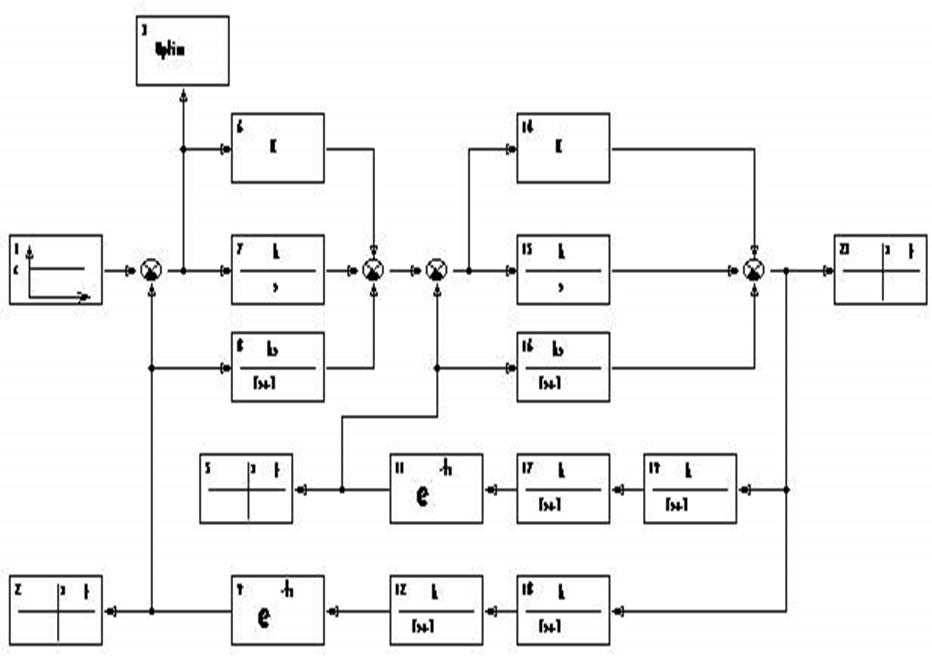
5.3. Оптимизация каскадной САР.
5.4. Расчёт показателей качества каскадной САР.
 |
4. Время регулирования tр = 1047 с
5. Время достижения первого максимума tмакс = 419 с.
6. Время нарастания tн = 257 с
7. Логарифмический декремент затухания:

Число колебаний n = 1
Заключение
Курсовое проектирование было нацелено на изучение и более детальное осмысление различий и преимуществ различных систем автоматического управления.
Вначале рассматривались самые простые одноконтурные системы, но как часто бывает простота не означает качество. Существенным фактором при расчётах являлось предположение о низкочастотном характере действующих на объект возмущений, но если это условие не выполняется то регулятор перестаёт работать в оптимальном режиме. Наличие чистого запаздывания и больших постоянных времени также отрицательно влияют на систему, причём, даже при оптимальных настройках регуляторов одноконтурные САР характеризуются большими динамическими ошибками, низкой частотой регулирования, длительными переходными процессами.
Поэтому в систему были введены дополнительные контура регулирования, то есть рассматривались многоконтурные системы. Комбинированные САР компенсировали значительные возмущающие воздействия, что позволила существенно снизить динамическую ошибку регулирования.
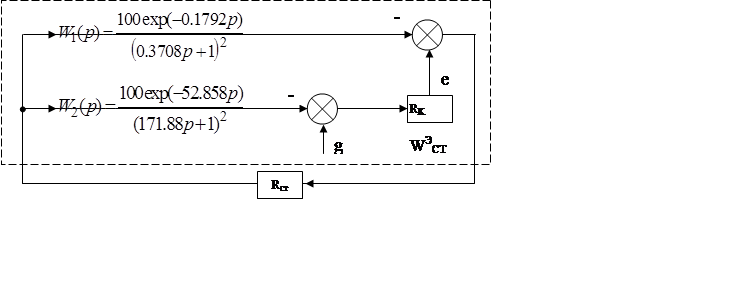
Дальнейшим рассмотрением схем с компенсацией возмущения по упреждающей цепи являются системы каскадного регулирования. Дополнительный регулятор осуществляет регулирование некоторой промежуточной регулируемой величины в местном контуре регулирования, в работу которого вмешивается нежелательное возмущение. Влияние возмущения на основную регулируемую величину будет тем меньше, чем выше быстродействие вспомогательного контура по отношению к основному, то есть повышается качество переходного процесса.
В заключение отметим, что из трёх рассматриваемых схем наиболее лучшей является схема каскадного регулирования.
1. Балабанов А.А. Локальные системы автоматики. – Кишинёв: УТМ, 1995. – 127 с.
2. Балабанов А.А. Проектирование, моделирование и расчёт систем локальной автоматики. – Кишинёв: ТУМ, 1995. – 35 с.
3. Курсовое и дипломное проектирование по автоматизации производственных процессов / Под ред. И. К. Петрова.-М.: Высш.школа,1986.-352 с.
4. Воронов А.А. Теория автоматического регулирования. – М.: Высшая школа, 1977. – 453 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.