Сигналы, действующие в системе: (сигналы определяются стрелками)
Н здан.- задающее воздействие (заданное значение, номинал)
Н текущ.- текущее значение регулируемого параметра
е- ошибка регулирования
управляющее воздействие
U1- выход алгоритма управления
U2- управляющее воздействие на выходе усилителя
U3- управляющее воздействие технологического процесса (объекта управления)
х*- выходная величина объекта управления (обычно мы её не наблюдаем)
х - выход датчика, пропорционален х*
f- возмущающее воздействие, те входные процессы, за счет которых регулируемая переменная отклоняется от заданного значения, в данной системе расход G2.
Назначение системы:
1) подбор такого значения управляющего воздействия, при котором значение регулируемой переменной равно заданному значению. При несоответствии (отклонении) начального значения уровня заданному значению, управляющее устройство увеличивает или уменьшает расход на входе для выполнения условия Н текущ..≈ Н задан.
2) равенство наступает, когда Н текущ.=Н задан. и G1= G2. Пусть при изменение значения G2 нарушается равенство G1= G2 и уровень отклоняется от заданного значения, появляется ошибка е и алгоритм управления снова выводит текущий уровень на заданное значение, при этом наступает равенство G1= G2 на новом уровне. Т.о. два назначения системы стабилизации уровня при изменении расхода G2 и др. возмущений.
Говорят: система отрабатывает (компенсирует) влияние возмущающих воздействий. Стрелка ↓f на структурной схеме показывает наличие возмущающего воздействия. Часто объект рисуется в виде схемы:
![]() f
f
![]()
![]() U x
U x
![]()
![]()
![]() ОУ где возмущающее воздействие приведено к выходу ОУ
ОУ где возмущающее воздействие приведено к выходу ОУ
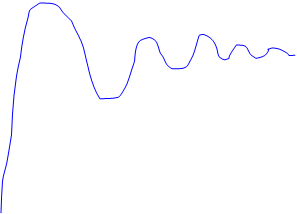
![]() Переходные процессы СУ.
Переходные процессы СУ.
 по времени называются графиками переходных
2
по времени называются графиками переходных
2
процессов. Они могут быть двух видов:
1) график перехода от начального значения к
заданному (апериодический)
2) график перехода от начального значения к
![]() заданному (колебательный с затухающими колебаниями)
заданному (колебательный с затухающими колебаниями)
График 2 может быть получен из графика 1 путем повышения быстродействия алгоритма управления (повышения его чувствительности к ошибке), при этом уменьшается время переходного процесса. Время такого процесса - время выхода на новое значение при допустимой ошибке 5%.
Цель создания эффективной СУ: добиться минимально возможного время переходного процесса. Время не может быть уменьшено меньше какого-то значения, т.к. это приводит к повышению колебательности и переходу к незатухающим расходящимся колебаниям, система становится неустойчивой и её работа нарушается.
Для создания высококачественной системы необходимо произвести расчеты системы, для этого необходимо:
1) изучить характеристики и построить математические модели элементов системы.
Математические модели - это дифференциальные уравнения, описывающие связь между входным и выходным параметрами элементов. Модели элементов могут быть выражены в виде придаточных функций, временных и частных характеристик.
2) изучить и построить математические модели входных сигналов, действующих на систему - заданное значение и возмущающее воздействие.




 q e
f x q x
q e
f x q x
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() УУ
ОУ x e
УУ
ОУ x e
![]()
![]()
![]()
![]() .
e
.
e
![]()
модели сигналов нужны для генерации сигналов и подачи их на соответственные входы СУ при математическом моделировании её работы.
3) для того чтобы построить модели элементов и сигналов необходимо изучить методы построения математических моделей (курс- идентификация).
4) при наличии моделей входных сигналов элемента, необходимо уметь прогнозировать изменения выходных сигналов элемента.
5) математическое моделирование работы всей СУ с целью:
а) анализ системы (изучение современных характеристик имеющихся систем, особенности её работы, качественные показатели).
б) синтез системы (выбор структуры системы, элементов системы и параметров системы, обеспечивающей её эффективную работу)
Курс «Математического моделирования элементов системы управления» предусматривает изучение вопросов 1,2,3,4. Изучение вопроса 5 требует знание теории автоматического регулирования, методов оптимизации и изучается в данном курсе.
Детерминированные сигналы и их модели.
Непериодические.
Скачкообразный (ступенчатый) входной сигнал.
![]() x(t)
в момент t=0 входной сигнал изменяется скачком,
x(t)
в момент t=0 входной сигнал изменяется скачком,
ступенчатым образом от 0 до значения А. dt по
A(t)=const амплитуде и новое значение t=0, являются
![]()
![]()
![]() относительными т.к.
относительными т.к.
![]()
![]() dt x(t)
x′(t)
dt x(t)
x′(t)
![]()
![]() t
t
![]()
![]() 0
0
x0+A
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.