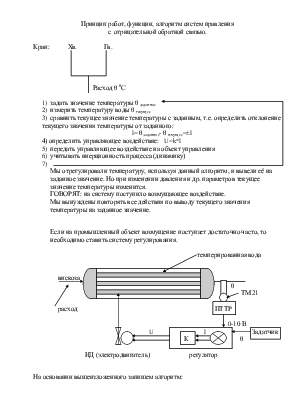
Принцип работ, функции, алгоритм систем правления
с отрицательной обратной связью.
![]()
![]()
![]()
![]() Кран: Хв.
Гв.
Кран: Хв.
Гв.
Расход θ 0С
1)
![]()
![]() задать значение температуры θ заданное
задать значение температуры θ заданное
2) измерить температуру воды θ текущее
3) сравнить текущее значение температуры с заданным, т.е. определить отклонение
текущего значения температуры от заданного:
l= θ заданное- θ текущее=±l
4) определить управляющее воздействие: U=k*l
5) передать управляющее воздействие на объект управления
6) учитывать инерционность процесса (динамику)
7)
![]()
Мы отрегулировали температуру, используя данный алгоритм, и вывели её на заданное значение. Но при изменении давления и др. параметров текущее значение температуры изменится.
ГОВОРЯТ: на систему поступило возмущающее воздействие.
Мы вынуждены повторять все действия по выводу текущего значения температуры на заданное значение.
Если на промышленный объект возмущение поступает достаточно часто, то необходимо ставить систему регулирования.
 |
 темперированная вода
темперированная вода
![]() вискоза
вискоза
 θ
θ
![]()
![]()
![]() ТМ 21
ТМ 21

расход ПТТР
![]()
0-10 В
![]()

![]()


 U
l Задатчик
U
l Задатчик
![]()
![]()
![]()
![]()
![]() К θ
К θ
ИД (электродвигатель) регулятор
На основании вышеизложенного запишем алгоритм:
![]()
![]() 1) Ставим задатчик, который в виде напряжения (U) ,
силы тока (I), давления воздуха и др. в каком-то масштабе дает
заданное значение θЗ.
1) Ставим задатчик, который в виде напряжения (U) ,
силы тока (I), давления воздуха и др. в каком-то масштабе дает
заданное значение θЗ.
Uзад.
10 10 В
![]()
![]()
![]()

![]()
![]() U заданное
U заданное
![]() θ
0С
θ
0С
100
2) Измеряем текущее значение θТ.(датчик параметра θТ с преобразователем)
3) Определяем отклонение текущего значения параметра от заданного, (элемент сравнения)
4) Определяем управляющее воздействие, (вычислительное устройство)
5) Передаем управляющее воздействие на теплообменник, (исполнительный механизм ИД)
Структурная схема системы управления.
Основной принцип управления:
Задача: необходимо стабилизировать уровень жидкости технологической емкости. Имеется емкость с раствором, в которую поступает реагент с расходом G1 на входе и отбирается реагент с расходом G2. Расход G2 –переменный и чтобы стабилизировать уровень необходимо изменять соответственно расход G1 на входе, G2 изменяется случайным образом, поэтому заранее рассчитать G1 невозможно. Построим систему с отрицательной обратной связью.
![]() параметра (4 м; 4,2 м; 3,6 м).
параметра (4 м; 4,2 м; 3,6 м).
датчик : формирует сигнал (значение тока, давления итр.) пропорциональный уровню (давление столба жидкости)
элемент сравнения: е=Нзадан. - Нтекущ.
алгоритм управления: пропорционален ошибке регулирования, изменяет положение клапана (формирует управляющее воздействие)
усилитель: служит для усиления управляющего сигнала по мощности или преобразовании его в другой вид по энергии (пневматический в электрический)
исполнительный механизм: служит для изменения расхода на входе емкости пропорционально управляющему воздействию.
Т.о. система включает с отрицательной обратной связью:
1) задатчик
2) датчик регулирующего параметра
3) элемент сравнения
4) алгоритм управления (вычислительное устройство)
5) усилитель
6) исполнительный механизм
7) сам объект управления
6
![]()
![]()
![]()
![]()
![]()
![]() G1
G1
 |
![]()
![]() 5
> Нзадан.=4
м
5
> Нзадан.=4
м
![]() 4 УУ
7
4 УУ
7
![]()
![]()
![]()


 1 e D
1 e D
![]()
![]()
![]()
![]() задатчик
задатчик
![]()
![]()
![]()
![]()
![]()
![]() 3 2
3 2
G2
Могут быть дополнительные элементы:
1) преобразовательный элемент - служит для преобразования сигнала оного вида в другой (электрического в пневматический; механического в электрический и т.д.)
2) усилительный элемент – служит для согласования энергии по мощности (например, выход микро процессора 0-10В, при силе тока 5мА, усиливается для управления двигателя мощностью 40 к Вт).
![]()
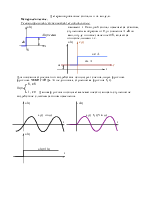
![]() Каждая система управления может быть
представлена в виде блока с входным и выходным сигналом.
Каждая система управления может быть
представлена в виде блока с входным и выходным сигналом.
 хвход.
хвых.
хвход.
хвых.
δy
Говорят: данная СУ преобразует входной сигнал в выходной, т.к. нам необходимо учитывать изменения входного и выходного сигналов во времени, то подразумевается, что входной и выходной сигналы изменяются во времени. Причем изменение во времени выходного сигнала зависит от закона изменения входного сигнала и характера преобразования, которое записывается обычно в виде дифференциального уравнения. Обратим внимание на то, что преобразование идет только в одном направлении х→у, тогда система управления можно представить в следующем виде .
![]() f
f
![]()
![]()
![]()
![]()
![]()
 Нздан. Е U1 U2 U3 x* x
Нтекущ.
Нздан. Е U1 U2 U3 x* x
Нтекущ.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() задатчик
АУ > ИМ ОУ D
задатчик
АУ > ИМ ОУ D
![]()
![]()
Структурная схема включает все элементы системы, каждая из которых преобразует свой входной сигнал в свой выходной сигнал, по своему закону преобразования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.