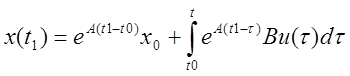
Теорема. Линейная динамическая система переходит из состояния х0 в состояние х1, принадлежащих пространству управляемых состояний, за конечное время t1
х0- принадлежит пространству управления.
![]() - принадлежит пространству упрвления
на основании свойства инвариантности
- принадлежит пространству упрвления
на основании свойства инвариантности
![]() - принадлежит , т.к х1 и
еA(t1-t) тоже принадлежит.
- принадлежит , т.к х1 и
еA(t1-t) тоже принадлежит.
Формула
показывает, что система переводится из нулевого состояния в ![]() за конечное время, что тоже самое из
х0 в х1.
за конечное время, что тоже самое из
х0 в х1.
Пусть rank P=m.
![]()
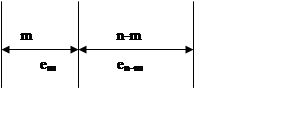 еm – линейно-независимые столбцы управления
еm – линейно-независимые столбцы управления
Т1=(е1…еm), T2=(em+1…en).
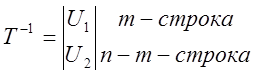
Введем ![]()
![]()
![]()

U2T1=0
T1 состоит из е1…еm порождающих пространство управляемых состояний, следовательно, U2x=0.

T1, АТ1 – принадлежит пространству управляемых состояний
U2AT1=0
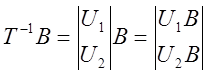
B – часть матрицы управляемости и принадлежит пространству управляемых состояний
U2B=0
 - каноническая форма
управляемости
- каноническая форма
управляемости
![]() -матрица m*m
-матрица m*m
![]() -полностью управляемая пара.
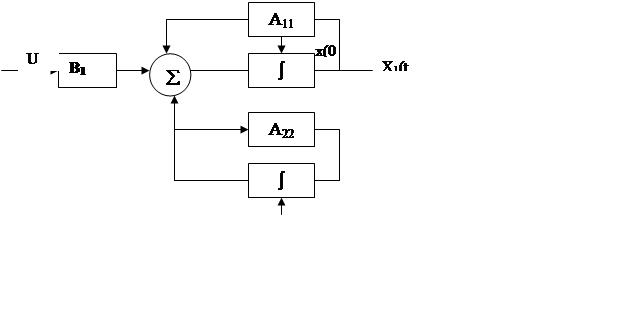
Поведение системы
-полностью управляемая пара.
Поведение системы ![]() -полностью независимо.
-полностью независимо.
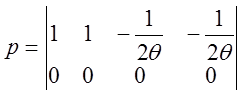
 |
|
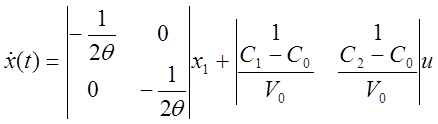
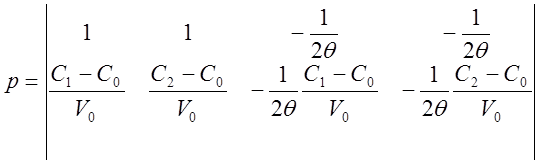
если С1=С2=С, то С0=С
Наблюдаемость.
Пусть y(t,t0,x0,u) является выходной функцией линейной динамической системы ![]()
![]() изменяющейся
от начального состояния x(t0).
Система называется полностью наблюдаемой, если для всех ti
существует такой момент t0, где - ¥ <t0
<t1, что из равенства y(t,t0,x0,u)=y(t,t0,x¢0,u), t0£t £t1 , для всех u(t) t0£t £t1 следует x0=x¢0.
изменяющейся
от начального состояния x(t0).
Система называется полностью наблюдаемой, если для всех ti
существует такой момент t0, где - ¥ <t0
<t1, что из равенства y(t,t0,x0,u)=y(t,t0,x¢0,u), t0£t £t1 , для всех u(t) t0£t £t1 следует x0=x¢0.
Теорема:
Система ![]() y=Cx, является полностью восстанавливаемой в том и только в том
случае, если для всех ti существует такой момент t0
- ¥<t0
<t1, что из равенства y(t,t0,x0,0)=0 t0£ t £t1 следует x0=0
y=Cx, является полностью восстанавливаемой в том и только в том
случае, если для всех ti существует такой момент t0
- ¥<t0
<t1, что из равенства y(t,t0,x0,0)=0 t0£ t £t1 следует x0=0


![]()
СФ(t,t0)x0=CФ(t,t0)x¢0 , x0=x¢0, СФ(t,t0)(x0-x¢0)=0
Наблюдаемость означает, что имеется возможность определения состояния в момент t0 по будущим значениям выходной переменной.
![]() Линейная динамическая система
Линейная динамическая система ![]() полностью наблюдаема
(восстанавливаема), если rank матрицы
полностью наблюдаема
(восстанавливаема), если rank матрицы
 равен n.
равен n.

Если матрица Q не имеет полного ранга, то существует такое x0 ,что:
Сx0=0 CAx0=0 ….. CA(n-1) x0=0.
Используя теорему Кели-Гамильтона, получим САL x0 =0, где L ³n.
Докажем другое утверждение теоремы:
y(t0)=Cx0=0 или Qx0=0
y¢(t0)=CАx0=0
…………………...
y(n-1)(t0)=CA(n-1) x0=0
Если Q не имеет полного ранга, то равенства не будет.
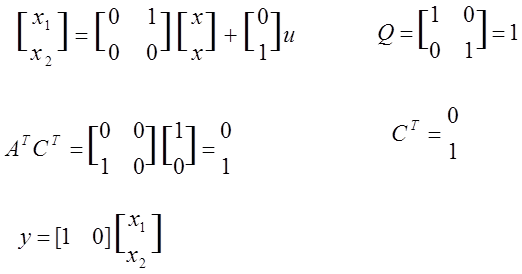
Пример:
Rank=2.
Критерий устойчивости линейных динамических систем.
Постановка
задачи: рассмотрение фундаментального решения 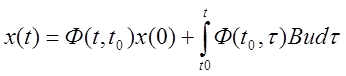 динамической
системы
динамической
системы ![]() показало его устойчивость, если
действительные части характеристических чисел матрицы А отрицательны.
показало его устойчивость, если
действительные части характеристических чисел матрицы А отрицательны.
Определение (прямое) характеристических чисел-процесс трудоёмкий, но не безнадёжный.
Возникает задача: определение отрицательности характеристических чисел матрицы А по самим коэффициентам матрицы А.
Предварительные замечания.
Рассмотрим характеристическое
уравнение:  .
.
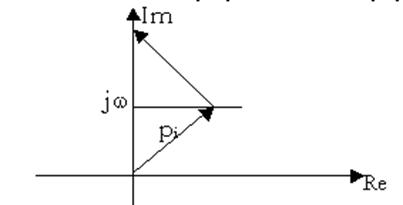
Введём вектор р=jw и рассмотрим 2 случая:
1. Имеем вектор ai=jw-pi, где pi=-a+jb.
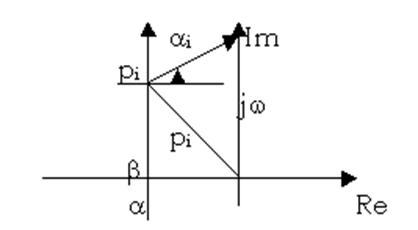 |
Argjw=-j¥ ai=-p/2, DArgai=p
Argjw=+j¥ ai=p/2.
 |
Рассмотрим D(jw)=Mod D(jw)e jArgD(jw)


Теорема:
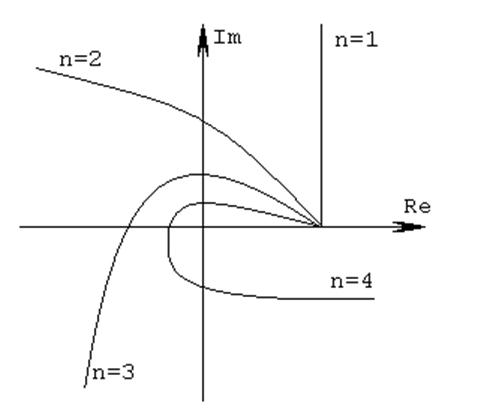
Изменение аргумента D(jw) при возрастании w от -¥ до +¥ равно разности между числом (n-m) корней уравнения D(jw)=0, лежащих в левой и правой полуплоскостях, умноженной на p, т.е. (n-m)p-mp.
Критерий
устойчивости Михайлова: 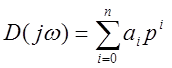
Если все корни отрицательны, то "рi : Reрi<0 Þ Darg D(jw)=np
D(jw)=u(w)+jv(w), где u(w)=а0–а2w2+а4w4-…..
v(w)=а1–а3w3+а5w5-…..
Так как u(w)- функция четная, а v(w)-функция нечетная, то D(jw)=-D(jw), т.е. годограф D(jw) симметричен относительно действительной оси.
Cистема автоматического управления устойчива, если при возрастании w от 0 до ¥ вектор D(jw) повернётся на угол np/2, где n-степень полинома D(jw)=0 или его годограф обходит последовательно в положительном направлении n квадрантов.
 |
Критерий устойчивости Раусса-Гурвица.
Основное соотношение, определяющее устойчивость DArg0<w<¥D(jw)=np
u(w)=±(а0wn–а2wn-2+а4wn-4-...+ аn)
v(w)=±(а1wn-1–а3wn-3+а5w5-…+аn-1w), D(jw)=åаipn-1.
Для того, чтобы система D(jw) была устойчивой, необходимо и достаточно, чтобы все главные определители определителю Гурвица были положительны.
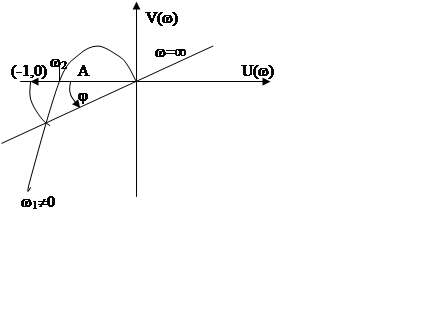
Частотный критерий устойчивости Найквиста-Михайлова.
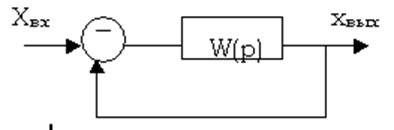 |
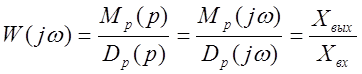
Введём функцию 
D(jw)=Dp(jw)+Mp(jw)
DArg0<w<¥D(jw)=(n-2m)p/2
DArg j(jw)=DArg D(jw)-DArg Dp(jw)=(n-2m)p/2-np/2=-mp.
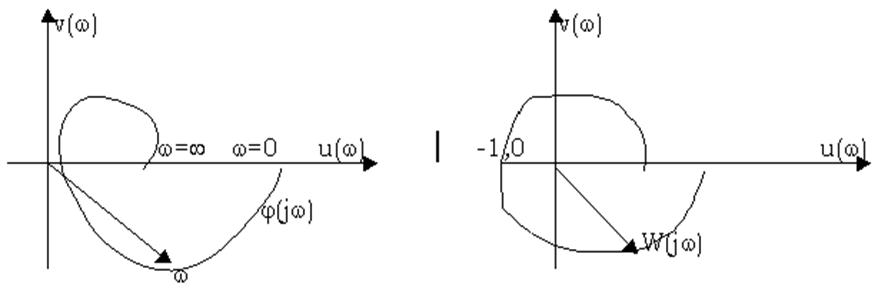 |
Но W(jw)=j(jw)-1, т.е. замкнутая система устойчива, если частотная характеристика разомкнутой системы не охватывает точку (–1,0) при изменении 0<w<¥.
Если разомкнутая система неустойчива, то DargDp(jw)=(n-2p)p/2
Если замкнутая
система устойчива, то Darg j(jw)=DargD(jw)-Dp(jw)=n
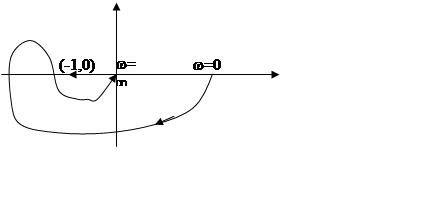 Замкнутая
система будет устойчива, если частотная характеристика неустойчивой разомкнутой
системы охватывает т.-1,0 в положительном направлении Р1/2 раз, где
Р – число неустойчивых корней.
Замкнутая
система будет устойчива, если частотная характеристика неустойчивой разомкнутой
системы охватывает т.-1,0 в положительном направлении Р1/2 раз, где
Р – число неустойчивых корней.
Запас по амплитуде и запас по фазе.
j - запас по фазе ½j½
20lg(1-A) – запас по амплитуде при проектировании не менее 6 дб.
 |
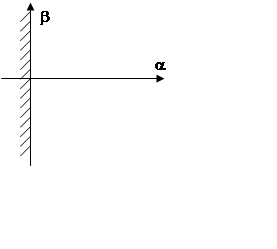
D-разбиение пространства параметров
Комплексное пространство, мнимая ось которого разделяет его на два полупространства: слева устойчивое, справа – неустойчивое.
 D(p)=Dp(p)+Mp(p)
– характеристическое уравнение или детерминант возвратной матрицы.
D(p)=Dp(p)+Mp(p)
– характеристическое уравнение или детерминант возвратной матрицы.
![]() Условие
D(p)=0= - является
функциональной зависимостью фиксирующей какое-то распределение корней и
параметров. Если взять и указанную неявную зависимость сделать явной
относительно любого параметра
Условие
D(p)=0= - является
функциональной зависимостью фиксирующей какое-то распределение корней и
параметров. Если взять и указанную неявную зависимость сделать явной
относительно любого параметра  ,
то зависимость будет при р=jw представлять преобразование пространства a+jb в U(w)+jV(w)=aj и в том же числе мнимую ось jw. Пусть преобразование может быть
представлено как на рисунке, т.е. однолистная область преобразована в
многолистную. Как правило, областью устойчивости является пересечение областей.
,
то зависимость будет при р=jw представлять преобразование пространства a+jb в U(w)+jV(w)=aj и в том же числе мнимую ось jw. Пусть преобразование может быть
представлено как на рисунке, т.е. однолистная область преобразована в
многолистную. Как правило, областью устойчивости является пересечение областей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.