Таблица 1 - Результаты анализа компоновок
|
Оцениваемые параметры |
Компоновки промышленных роботов |
|||
|
а) полярная цилиндрическая |
б) пространственная декартовая |
в) полярная сферическая |
г) ангулярная |
|
|
Максимальная погрешность, мм |
0,854 |
0,671 |
0,542 |
1,389 |
|
Время рабочего цикла, с |
39 |
54 |
33 |
52 |
Самую низкую среднюю погрешность имеет промышленный робот, работающий в полярной сферической системе координат, он же обладает самим малым временем рабочего цикла.
Ангулярная система координат имеет самую большую погрешность.
Самым оптимальным вариантом является полярная цилиндрическая компоновка, она обладает хорошим сочетанием точности позиционирования и производительности.
Если рассматривать предыдущие компоновки, то для роботов декартовой компоновки требуется наличие направляющих для механизмов линейного перемещения, это дополнительно ограничивает рабочую зону и затрудняет подходы для обслуживания персоналом технологического оборудования и ПР.
Робот, работающий в полярной сферической системе координат требует дополнительную ориентирующую степень подвижности для захватного устройства, поскольку манипулятор наклоняется для обслуживания технологического оборудования на определенный угол, а ориентация объекта манипулирования должна быть постоянной, вне зависимости от угла наклона манипулятора.
Следовательно, мы выбираем компоновку робота, работающего в полярной цилиндрической системе координат.
1.4 Анализ конструкции роботов, работающих в цилиндрической системе координат
1.4.1 Конструкция ПР М20П.40
Общий вид робота показан на рисунке 10.
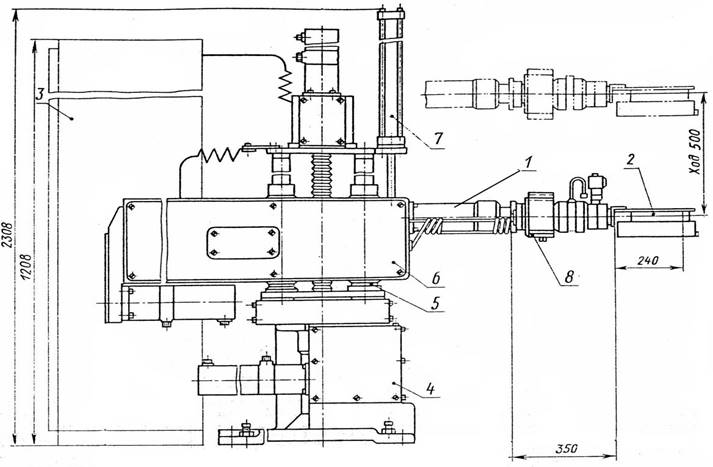
Рисунок 10. ПР «М20П.40»: 1 - Манипулятор; 2 - Схват; 3 - Устройство ЧПУ;
4 - Механизм поворота; 5 - Механизм подъема; 6 - Механизм выдвижения;
7 - Балансир; 8 - Блок поворота.
1.4.1.1 Характеристики робота приведены в таблице 2.
Таблица 2
|
Наименование параметра |
Единица измерения |
М20П.40.01 |
|
Номинальная грузоподъемность: суммарная на один захват |
кг |
20 |
|
Число степеней подвижности |
- |
5 |
|
Количество: Рук робота Захватов на одну руку |
- |
1 1;2 |
|
Тип привода |
- |
Электропневматический |
|
Погрешность позиционирования |
мм |
1 |
|
Наибольший вылет руки (R) |
- |
1100 |
|
Тип системы управления |
- |
Позиционная |
|
Наибольшее количество одновременно управляемых координат |
- |
2 |
|
Способ программирования |
- |
Обучение |
|
Линейные перемещения по координатным осям (величина/скорость) |
||
|
Вращение вокруг Z |
|
300/60 |
|
Z R |
|
500/0,5 1100/1,0 |
|
Габарит робота (без захватов и УЧПУ) |
мм |
650х1950х2230 |
|
Масса механической системы |
кг |
510, 580, 594 |
1.4.2 Конструкция ПР «РГШ-40»
Общий вид робота показан на рисунке 11.
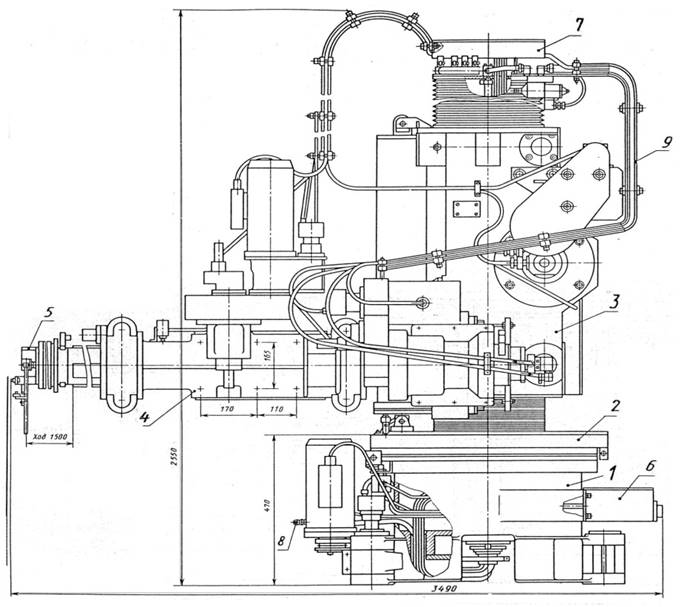
Рисунок 11. ПР «РГШ — 40»: 1 - Основание; 2 - Модуль поворота;
3 - Модуль подъема; 4 - Модуль руки; 5 - Схват; 6,7 - Клеммная коробка;
8 - Штуцер; 9 - Шланги.
1.4.2.1 Характеристики робота приведены в таблице 3.
Таблица 3
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.