Результатом расчета переходных процессов являются зависимости угловой скорости и момента от времени, т.е. ω(t) и M(t). В ряде случаев задается по закону
ω0(t)=ω0нач+ε0t, где ω0нач-заданная угловая скорость при t=0;
ε0-заданное значение углового ускорения(замедления или ускорения).
В этом случае действительная угловая скорость двигателя рассчитывается следующим образом[6]:
ω=ε0t+(
ω0нач-∆ωст-ε0Тм)(1-![]() )+ωнач
)+ωнач![]() , где ∆ωст-статическое
падение скорости двигателя:
, где ∆ωст-статическое
падение скорости двигателя:
ωнач-начальная скорость двигателя.
Статическое падение угловой скорости двигателя можно найти через жесткость механической характеристики:
∆ωст=![]() , где
, где ![]() -постоянный
статический момент на рабочих участках технологического цикла.
-постоянный
статический момент на рабочих участках технологического цикла.
Так как в нашем случае Мст=Муст=3,13 Н*м, то по формуле (4.26) получаем:
∆ωст=![]() =60,60(рад/с).
=60,60(рад/с).
Электромагнитный момент двигателя определяется выражением:
М=Мст+Jε0+(Мнач-Мст-
Jε0)![]() , где Мнач- начальное
значение электромагнитного момента двигателя .
, где Мнач- начальное
значение электромагнитного момента двигателя .
Для передней руки момент сопротивления определяется только активным статическим моментом. Поэтому будем использовать формулы для пуска и торможения двигателя при активном статическом моменте.
Начнем с пуска при активном статическом моменте. На интервале времени 0<t<t0, где t0-заданное время пуска, имеем:
ω=ε0t-(∆ωст+ε0Тм)(1-![]() ),
),
М=Мст+Jε0(1-![]() )-
Мст
)-
Мст![]()
На интервале t0<t<tп+3Тм:
ω=ω0кон-∆ωст-ε0Тм![]() , где ω0кон-конечное
значение заданной угловой скорости;
, где ω0кон-конечное
значение заданной угловой скорости;
М=Мст+Jε0![]() .
.
Торможение при активном статическом моменте. На интервале времени 0<t<t0, где t0-уже заданное время торможения имеем:
ω= ω0нач-∆ωст-
ε0t+ε0Тм)(1-![]() ),
),
М=Мст-Jε0![]() .
.
На интервале t0<t<t0+3Tм:
ω= -∆ωст+ε0Тм![]() ,
,
М=Мст-Jε0![]() .
.
Абсолютное значение заданного углового ускорения как для пуска (t0=tп, ω0кон=ωуст), так как и для торможения(t0=tт, ω0нач=ωуст) двигателя выразим следующим образом:
ε0=![]() ;
;
ε0=![]() =104.72(рад/с2).
=104.72(рад/с2).
Подставив все известные величины в формулы(4.28)-(4.35), получим следующие переходные переходные характеристики:
а) для пуска:
ω(t)=
M(t)= б) для торможения:
б) для торможения:
ω(t)=
M(t)=
Графики зависимостей (4.38)-(4.40) изображены на рисунках 4.2, 4.3.
В целом на рисунках механические
переходные процессы имеют типичный для пуска и торможения вид. Но есть принципиальные
отличия- это наблюдается во время пуска при t![]() (0,9;0,6)
для зависимости ω(t) и во время торможения при
t
(0,9;0,6)
для зависимости ω(t) и во время торможения при
t![]() (0,9;1,6)
для зависимостей ω(t), M(t).
Эти отличия объясняются тем, что формулы для расчета переходных процессов не учитывают
принятых ещё в разделе 2 допущений.
(0,9;1,6)
для зависимостей ω(t), M(t).
Эти отличия объясняются тем, что формулы для расчета переходных процессов не учитывают
принятых ещё в разделе 2 допущений.
Так, в действительности при остановке ЭД передняя рука не будет двигаться самостоятельно под действием силы тяжести из-за редуктора с большим передаточным числом(i=255.4).
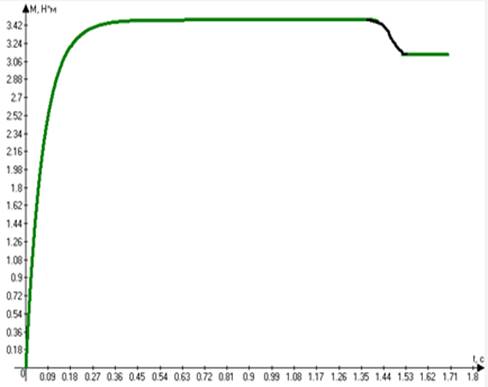
Рис.
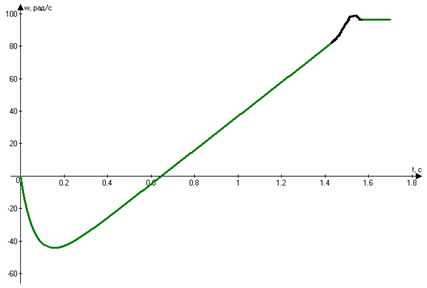
Рисунок 4.2-Механические переходные процессы в ЭП при пуске
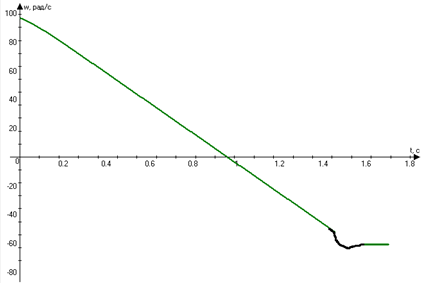
Рис.
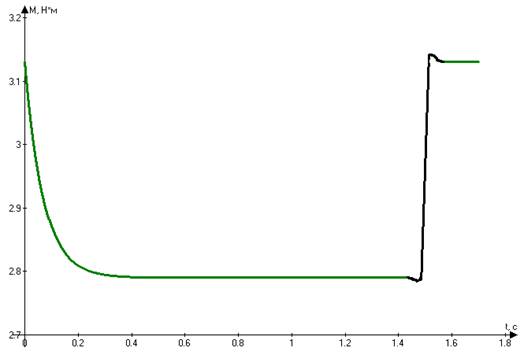
Рисунок 4.3-Механические переходные процессы в ЭП при торможении
Время окончания переходного процесса для рассмотренных зависимостей брали, считая двигатель апериодическим звеном 1-го порядка(t0+3Tм=1,7 с.). Обычно для апериодического звена по истечении указанного времени, отклонения скорости и момента от установившихся значений составляют не более 5%. В данном случае, как видим, это не совсем так ввиду принятых допущений.
s=![]() =
=![]() ;
;
s=![]() =0,31
или 31%.
=0,31
или 31%.
Такое большое значение статизма объясняется, как разомкнутой структурой ЭП, так и тем, что двигатель работает по искусственной механической характеристике со скоростью идеального ХХ, меньшей в 2 раза, чем аналогичная скорость для естественной характеристики.
Разомкнутый ЭП данного проекта не подходит для регулируемых приводов станков и ПР: так максимально допустимое значение статической ошибки регулируемого ЭП для диапазона регулирования 100 составляет 5%[7]. Эта проблема решается построением замкнутых структур ЭП, что будет рассмотрено в следующем разделе.
Размещено на
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.