Мэкв=0,21Н*м![]() Мном=1.7
Н*м
Мном=1.7
Н*м
Мmax=3.17
Н*м![]() Mдоп=8,5
Н*м
Mдоп=8,5
Н*м
Можно сделать вывод о соответствии предварительно выбранного ЭД условиям работы проектируемого ЭП.
4. Определение основных характеристик привода
4.1 Построение и анализ механических характеристик двигателя
Статические механические характеристики дают основные представления об электромеханических свойствах ЭП при изменениях нагрузки в статических режимах работы. Построенные естественная и искусственные статические характеристики позволяют дать ответ о том, как выполняется одно из требований, предъявленное к ЭП, а именно, точность регулирования. Это требование оценивается значением модуля статической жесткости механической характеристики, а так же может быть оценено её статизмом. Чем большее значение имеет модуль жесткости, тем точнее поддерживается скорость ЭП при изменениях нагрузки и регулирования скорости[6].
Механическая характеристика ЭД представляет собой зависимость угловой скорости вращения вала ω(частоты вращения n) от момента М, развиваемого двигателем. ДПТ независимого(параллельного) возбуждения, как уже было выше упомянуто(см.подраздел 3.3), имеет линейные механические характеристики[6]:
ω=ω0-![]() ,
,
где М-момент, развиваемый двигателем;
![]() -сумарное
сопротивление якорной цепи, включающее внешнее и внутреннее сопротивление якоря
двигателя.
-сумарное
сопротивление якорной цепи, включающее внешнее и внутреннее сопротивление якоря
двигателя.
Выбранный ДПТ работает в режиме S5 и имеет искусственную механическую характеристику со скоростью вращения идеального ХХ ω01=192,92 рад/с и номинальной скоростью ωуст=157,08 рад/с. Естественная характеристика определена скоростями ω0=350 рад/с и ωном=314,16 рад/с.
Для построения таких механических характеристик достаточно двух точек:
1) ω=ω0, М=0;
2) ω=ωном, М=Мном.
Графики естественной и искусственной механических характеристик ДПТ изображены на рисунке 4.1.
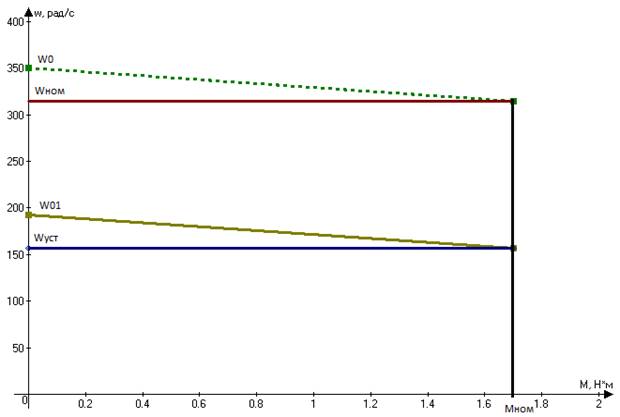
Рисунок 4.1-Механические характеристики ДПУ 200-500-3 Д39-09-УХЛ4
Пока в нашем случае суммарное
сопротивление якорной цепи определяется только внутренним сопротивлением якоря двигателя,
т.е. ![]() =Rя.
Константа c=0,4 была уже определена(см.подраздел
3.3).
=Rя.
Константа c=0,4 была уже определена(см.подраздел
3.3).
Напряжение, прикладываемое к якорной цепи при искусственной характеристике, определим по формуле:
Uуст=ω01с;
Uуст=1992,92*0,4=77,17 (В).
Жесткость естественной механической характеристики определяется как:
β=![]() =
=![]() =
=![]() .
.
Для искусственной характеристики в нашем случае формула (4.3) примет вид:
β=![]() ;
;
β=1,7/(192,92-157,08)=0,047(Н*м*с).
4.2 Расчет скорости для точной остановки и анализ результатов
Точность остановки оценивают величиной максимального возможного смещения(линейного или углового) остановленного рабочего органа производственного механизма от заданной(расчетной) точки(или положения) остановки.
Команда на торможение ЭП обычно подается в схему автоматически, в момент прохождения рабочим органом механизма определенной координаты пути. За время от момента подачи команды на торможение до полной остановки ЭП рабочий орган проходит(поворачивается) на расстояние Sт(на угол φт).
Угловое перемещение вала двигателя определяется как:
φт=ωнач∆tсобс+J![]() , где ωнач-угловая
скорость ЭП;
, где ωнач-угловая
скорость ЭП;
∆tсобс- время срабатывания электрических аппаратов;
J- суммарный момент инерции привода;
Мдин’- динамический момент, действующий на механизм.
В связи с возможным разбросом
действительных значений ωнач, ∆tсобс,
J, Мдин’ от их среднерасчетных
значений путь φт может колебаться от некоторого
минимального значения ![]() до
некоторого максимального
до
некоторого максимального ![]() .
Точность остановки ЭП в этом случае оценивают величиной:
.
Точность остановки ЭП в этом случае оценивают величиной:
∆φт=![]() , т.е. расчетную точку остановки
располагают в середине зоны точности[6].
, т.е. расчетную точку остановки
располагают в середине зоны точности[6].
Чтобы осуществлялась точная остановка механизма, должно выполняться условие:
∆φт![]() ∆
∆![]() ,
,
где ![]() -допустимая
неточность позиционирования рабочего органа.
-допустимая
неточность позиционирования рабочего органа.
Действительные значения величин, составляющих ∆φт, можно представить через средние значения и отклонения от этих средних:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.