ГСП – сложная развивающаяся система, состоящая из ряда подсистем. В качестве подсистем выступают проблемно-ориентированные комплексы унифицированных технических средств, обеспечивающие решение определенного круга функциональных задач в автоматизированных системах управления на принципах агрегатирования и унификации. В связи с непрерывным проникновением автоматизации во все сферы народного хозяйства, создаются проблемно-ориентированные агрегатные комплексы унифицированных приборов и средств автоматизации различного непромышленного назначения, отличающиеся от комплексов приборов и средств автоматизации промышленного назначения условиями применения, набором функциональных задач и структурой номенклатуры, и не входящие в ГСП, которые получили широкое применение в различных областях. В состав этих комплексов вошли изделия, не удовлетворяющие требованиям ГСП, в частности по эксплуатационным, предъявляемым к промышленным приборам (например, агрегатные комплексы средств электроизмерительной и аналитической техники). Вместе с тем идеология и принципы построения, ряд параметров и характеристик, связанных с условиями совместимости изделий и конструктивной базой оказалась заимствованной из ГСП. Такой подход представляется рациональным, поскольку позволяет, дополняя существующую номенклатуру комплексов ГСП, существенно расширить область применения уже разработанных и выпускаемых серийно изделий.
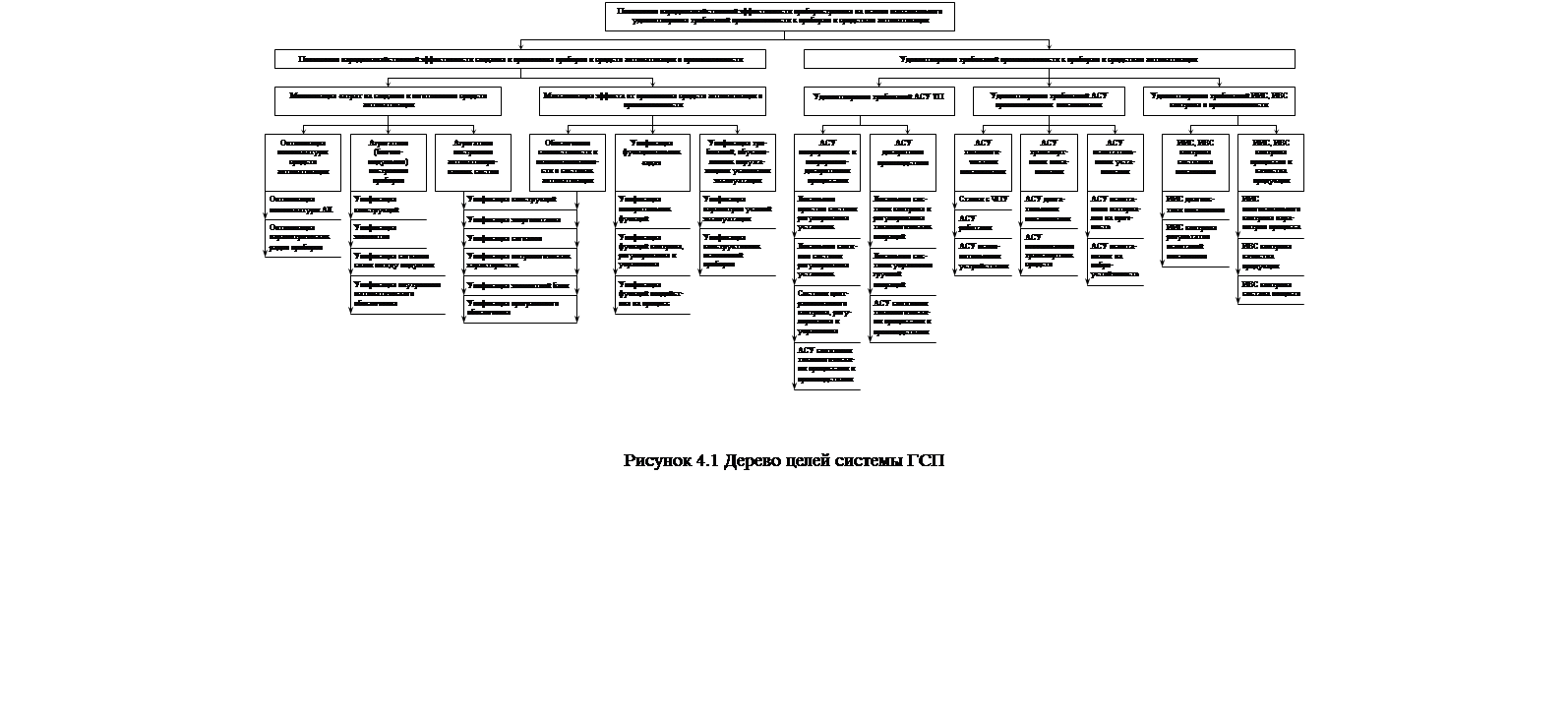
Структура ГСП. ГСП состоит из ряда обособленных и достаточно устойчивых групп (семейств, комплексов, рядов) изделий. Структура ГСП отражает перечень этих групп, их назначение, выполняемые функции, а также взаимосвязи между этими группами. В зависимости от принципа, положенного в основу построения структурной схемы, структура ГСП может быть представлена в виде нескольких структурных схем.
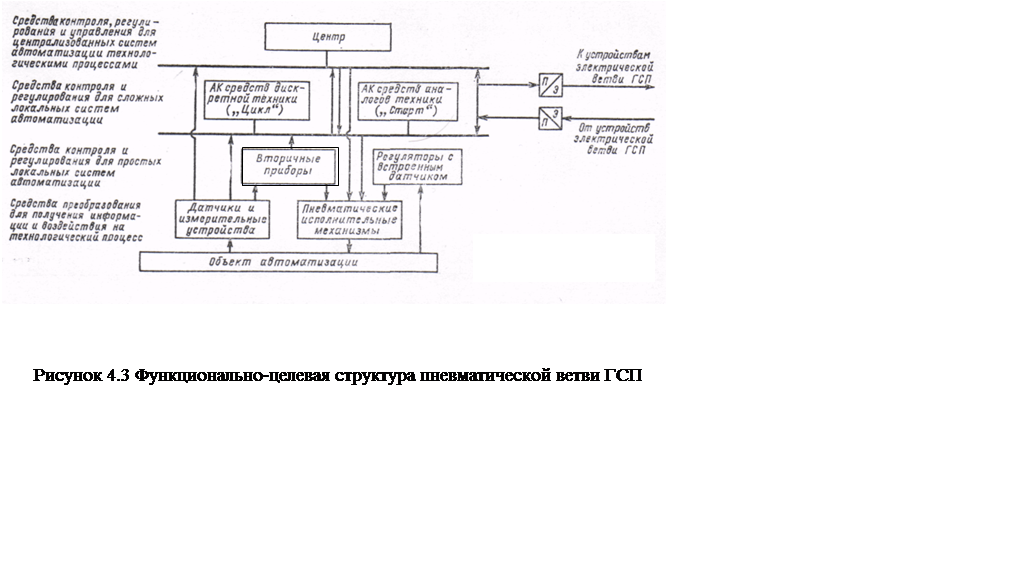
Функциональная структура тесно связана с целевой функцией и является важной для понимания сущности системы. Функциональная структура ГСП носит линейный характер и состоит из электрической, пневматической, гидравлической ветвей и ветви приборов, работающих без вспомогательной энергии. В каждой из них выделяются средства получения, передачи, обработки и формирования командной информации и средства, преобразующие командные сигналы в воздействие на технологический процесс. Более удобной является структура ГСП иерархического типа на основе функционального признака (рисунок 4.3). При этом жирные линии объединяют комплексы технических средств одного уровня, имеющие при этом общую конструктивную базу, то есть унифицированные типовые конструктивы (УТК). Стрелки указывают направления информационных связей между отдельными группами изделий при их совместном применении в АСУ ТП. Таким образом, наличие стрелки означает, что между этими группами приборов реализована возможность передачи информации с помощью унифицированных сигналов в направлении, указанном стрелкой, а ее отсутствие – что такие взаимосвязи не предусмотрены. Стрелки между группами средств и объектом автоматизации указывают на взаимосвязь их выходных сигналов с технологическими параметрами процесса.
В каждой ветви технические средства разделены на группы, расположенные на разных уровнях в зависимости от функционально-целевого назначения.
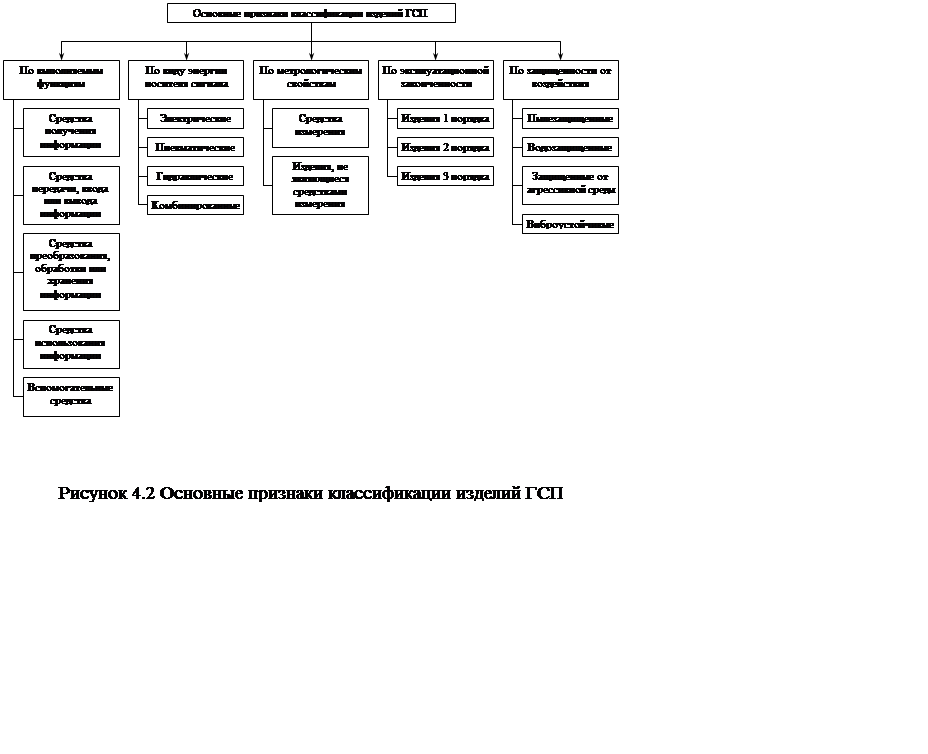
Выделим искомый регулятор в системе ГСП (рисунок 4.2). По выполняемым функциям он относится к системам получения (так как в его состав входит датчик) и использования информации. По виду энергии носителя сигнала регулятор является пневматическим. По метрологическим свойствам относится к изделиям, не являющимся средствами измерения. По защищенности от внешних воздействий является водозащищенным.
 |
 |
|||
 |
|||
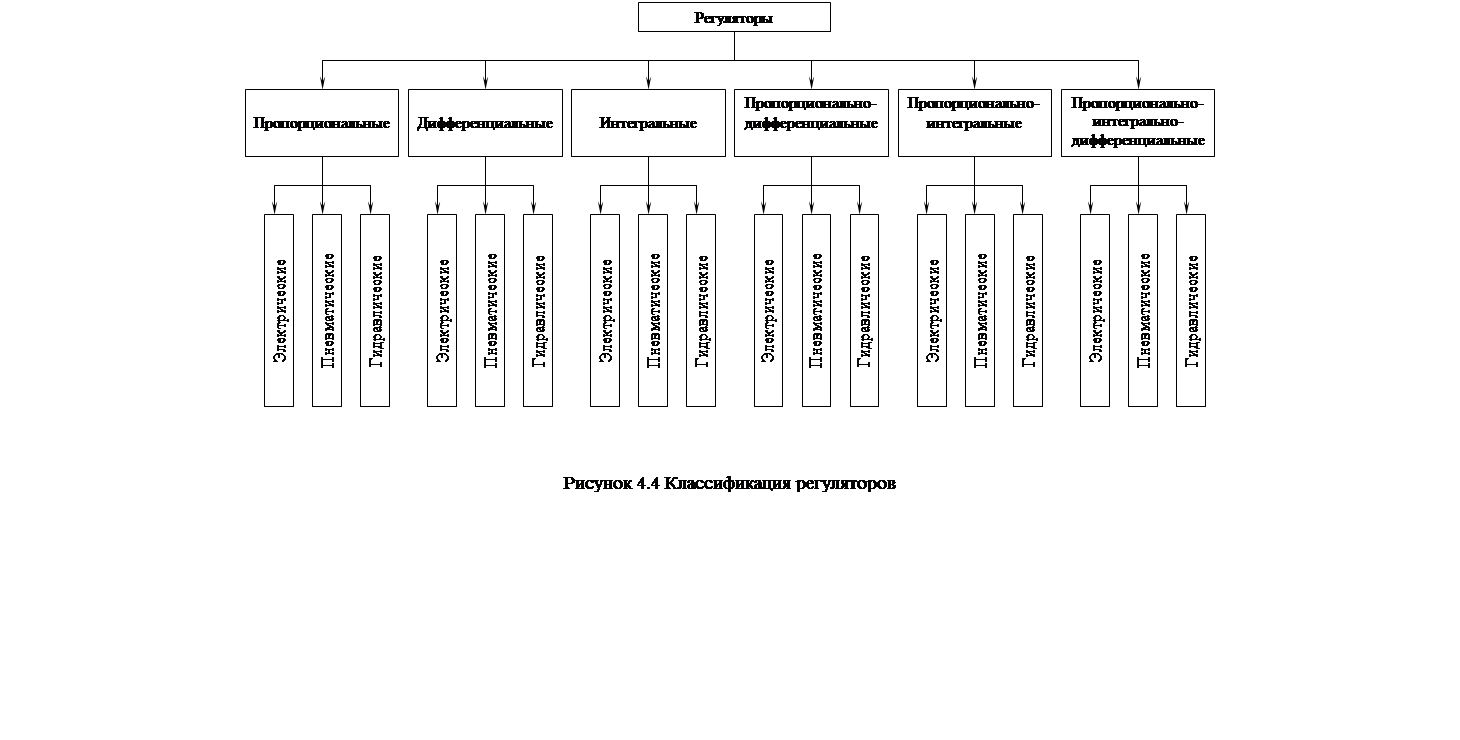 |
Построим классификацию регуляторов.
В качестве первого классификационного признака примем закон регулирования, а в качестве второго – вид используемой энергии. Классификация регуляторов приведена на рисунке 4.4. Рассмотрим ее более подробно [4.2, 4.3].
По закону регулирования регуляторы делятся на пропорциональные (П), дифференциальные (Д), интегральные (И), пропорционально-интегральные (ПИ), пропорционально-дифференциальные (ПД) и пропорционально-интегрально-дифференциальные (ПИД).
Пропорциональные регуляторы
описываются уравнением ![]() , то есть выходная величина
прямо пропорциональна входной и применяются в простых системах регулирования
объектов с малой инерционностью, где не требуется достижения высокого качества
управления. Достоинством пропорционального регулятора является простота,
недостатком – наличие статической ошибки регулирования, появление динамической
ошибки при резком изменении регулируемой величины.
, то есть выходная величина
прямо пропорциональна входной и применяются в простых системах регулирования
объектов с малой инерционностью, где не требуется достижения высокого качества
управления. Достоинством пропорционального регулятора является простота,
недостатком – наличие статической ошибки регулирования, появление динамической
ошибки при резком изменении регулируемой величины.
Интегральный регулятор описывается
уравнением  . Он применяется в системах, в
которых необходимо устранить статическую ошибку управления. К его достоинствам
относится отсутствие статической ошибки, к недостаткам – высокая инерционность
и наличие динамической ошибки.
. Он применяется в системах, в
которых необходимо устранить статическую ошибку управления. К его достоинствам
относится отсутствие статической ошибки, к недостаткам – высокая инерционность
и наличие динамической ошибки.
Дифференциальный регулятор
описывается уравнением  . Его применяют
для повышения качества управления и устранения динамической ошибки при резком
изменении входной величины для систем любого порядка, имеющих запаздывание.
Достоинство дифференциального регулятора состоит в отсутствии динамической
ошибки управления, недостаток – в наличии статической ошибки и управлении
только при изменении входной величины, поэтому он применяется в сочетании с
пропорциональным, интегральным или интегрально-пропорциональным регулятором.
Дифференциальный регулятор (приставку предварения) применяют, когда
запаздывание имеет такое значение, что действующий регулятор не справляется с
задачей регулирования в требуемых пределах. Для достижения лучшего качества
управления применяют также регулирование по второй производной, что позволяет
устранить динамическую ошибку . Управление по третьей производной не
применяется в связи с высокой погрешностью ее вычисления и низкой
помехоустойчивостью.
. Его применяют
для повышения качества управления и устранения динамической ошибки при резком
изменении входной величины для систем любого порядка, имеющих запаздывание.
Достоинство дифференциального регулятора состоит в отсутствии динамической
ошибки управления, недостаток – в наличии статической ошибки и управлении
только при изменении входной величины, поэтому он применяется в сочетании с
пропорциональным, интегральным или интегрально-пропорциональным регулятором.
Дифференциальный регулятор (приставку предварения) применяют, когда
запаздывание имеет такое значение, что действующий регулятор не справляется с
задачей регулирования в требуемых пределах. Для достижения лучшего качества
управления применяют также регулирование по второй производной, что позволяет
устранить динамическую ошибку . Управление по третьей производной не
применяется в связи с высокой погрешностью ее вычисления и низкой
помехоустойчивостью.
Пропорционально-интегральный
регулятор описывается уравнением  . Его применяют
для более высокого качества регулирования неустойчивых технологических объектов
регулирования. Он менее критичен к инерционности объекта управления, но
сохраняет динамическую ошибку.
. Его применяют
для более высокого качества регулирования неустойчивых технологических объектов
регулирования. Он менее критичен к инерционности объекта управления, но
сохраняет динамическую ошибку.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.