Ранее отмечалось, что для форсирования переходных процессов напряжение ЭМУ во время их протекания значительно превышает номинальное напряжение обмотки возбуждения генератора. Следовательно, ЭМУ должен быть выбран с большим запасом по напряжению, и его остаточное намагничивание будет относительно велико. Отметим, например, что напряжение на выходе усилителя при разомкнутых обмотках управления достигает в некоторых случаях десятков вольт. Коэффициент усиления будет зависеть при этом от предшествующего режима работы. Последнее влечет за собой потерю стабильности характеристик системы.
Для получения стабильных характеристик необходимым является подавление остаточного намагничивания ЭМУ. Радикальным методом уменьшения петли гистерезиса ЭМУ является введение отрицательных обратных связей по напряжению ЭМУ, которые, как отмечалось, способствуют «сужению» петли гистерезиса, стабилизируя коэффициент усиления ЭМУ. Однако введение сильной отрицательной обратной связи, уменьшая остаточное намагничивание ЭМУ, приводит к одновременному снижению коэффициента усиления, так как при одном и том же сигнале на задающей обмотке э. д. с. на выходе усилителя будет меньше вследствие размагничивающего действия обратной связи. Снижение коэффициента усиления при высоких требованиях к коэффициенту заполнения характеристики системы является часто недопустимым.
Таким образом, для того чтобы повысить стабильность характеристик системы с ЭМУ, не снижая требований к системе регулирования, необходимо ввести сильную отрицательную обратную связь по напряжению ЭМУ для уменьшения остаточной э. д. с. последнего до допустимых значений (около 2—5 В) и одновременно принять меры для повышения коэффициента усиления с помощью дополнительного усилителя. Компенсация снижения коэффициента усиления в системах электроприводов ряда экскаваторов производится с помощью промежуточных МУ.
Отметим, что снижение остаточного намагничивания ЭМУ до приемлемых значений может быть также осуществлено методом «магнитной тряски». На некоторых экскаваторах применяются ЭМУ с гасительной катушкой под полюсами. По этой катушке для перемагничивания пропускается переменный ток.
Основные узлы принципиальной схемы экскаваторного электропривода с ЭМУ и МУ приведены на рис. 3-10. Не останавливаясь подробно на описании таких узлов схемы, как токовая обратная связь с обмоткой ОТыу, обратная связь по напряжению с обмоткой ОНыу, узел задающей цепи ит. п., отметим, что ее принцип работы не имеет отличия от аналогичных узлов схемы с ЭМУ, приведенной на' рис. 3-9. Характеристика намагничивания ЭМУ, которая может быть получена в приведенной схеме, практически безгистерезисная. Остаточная э. д. с. не превосходит 2—5 В, т. е. снижена в несколько раз по сравнению со схемой включения ЭМУ без промежуточного МУ. Действие жесткой отрицательной связи, осуществляемой обмоткой ОСэму, приводящее к снижению коэффициента усиления, компенсируется повышением последнего с помощью МУ. Размагничиванию ЭМУ способствует и то обстоятельство, что в его задающей обмотке 03зму, подключенной к выходу МУ, протекает выпрямленный ток, который, кроме постоянной, содержит переменную составляющую, частота которой равна удвоенной частоте источника питания МУ.
В приведенной схеме (рис. 3-10) применен двухтактный МУ с выходом на постоянном токе. Причем задающая обмотка 03вм±у включается на разность падений напряжений в балластных резисторах. Наличие балластных резисторов в схеме снижает реальный к. п. д. усилителя 'до 8—12% и приводит к увеличению его габаритов.
Электропривод экскаваторов по системе генератор — двигатель с ЭМУ и МУ позволяет получить весьма качественные характеристики статических и переходных режимов машин большой производительности. Его применение безусловно явилось шагом вперед в развитии отечественного машиностроения. Однако наряду с положительной оценкой системы нельзя не упомянуть ее сложность в отношении методов получения оптимальных статических характеристик и формирования переходных процессов, а также сложность наладки и эксплуатации. Последнее обстоятельство определяется склонностью системы к колебаниям, а следовательно, необходимостью применения гибких стабилизирующих связей по напряжению ЭМУ, а иногда и генератора и нестабильностью ее параметров, зависящих от температуры и ряда других факторов. Сложность системы требует наличия в штате обслуживающего персонала электромехаников высокой квалификации.
При таком положении естественным является желание упростить систему электропривода, уменьшить количество аппаратов и по возможности исключить из нее сложный электромашинный усилитель, который является слабым звеном всей системы.
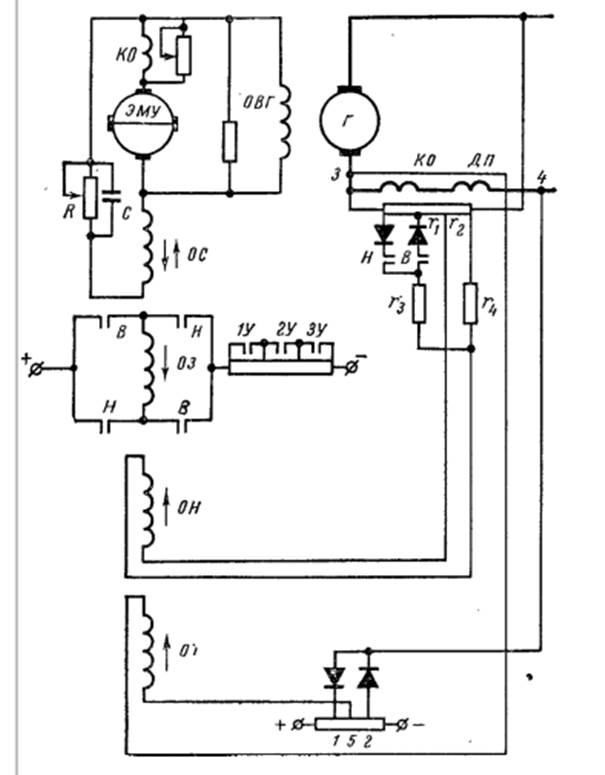
Рис.1 - Схема управления возбуждением генератора в системе Г—Д с ЭМУ.
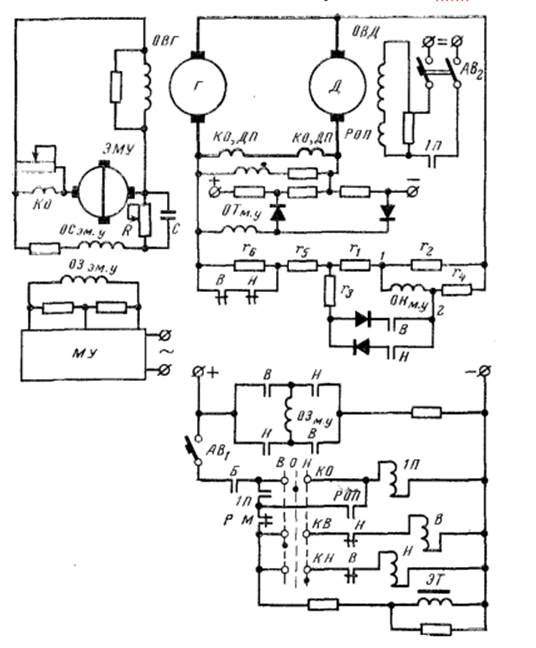
Рис.2 - . Схема управления электроприводом экскаватора большой производительности с применением ЭМУ и МУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.