



Защита двигателей переменного тока с применением микропроцессорного блока защит типа БЗ-03
1. Цель работы. Ознакомление с устройством, принципом действия, и испытанием блока защит БЗ-03. Расчет уставок защит двигателя.
2. Краткие теоретические сведения
2.1. Назначение блока защит БЗ-03
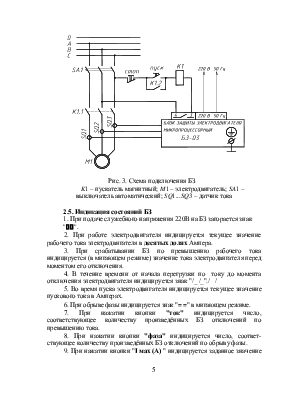
Блок защиты электродвигателя БЗ-03 (БЗ) предназначен для защиты трёхфазных электродвигателей от перегрузок или обрыва фазы. Защита осуществляется путём отключения электродвигателя при возникновении аварийных режимов.
2.2. Основные технические данные и характеристики БЗ
− Диапазон рабочего тока (программируемый)-(3…10) А.
− Время срабатывания при перегрузке электродвигателя -программируемое, зависит от кратности перегрузки.
− Время разгона (контроля перегрузок пускового режима)-программируемое, в пределах 1...99 с с дискретностью 1с.
− Время срабатывания при обрыве фазы – не более 2с.
− Время блокировки пуска программируемое, в пределах (0...98)мин., с дискретностью – 1 минута. При установке значения "99" блокировка продолжается до нажатия кнопки "Сброс".
− Емкость счётчиков количества срабатываний БЗ по перегрузке и по обрыву фазы – 99.
− После заполнения счётчики обнуляются и работают в суммирующем режиме до очередного заполнения.
− Число параметров и состояний, отражаемых на цифровом индикаторе - 13.
− Число программируемых параметров 5.
− Питание - сеть 220В +10% – 40%, частота 50 Гц.
− Потребляемая мощность - не более 2,5 Вт.
2.3. Устройство и принцип действия
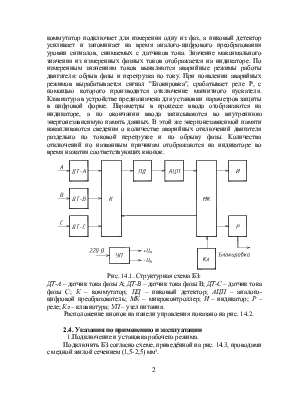
БЗ состоит из микроконтроллера и датчиков тока. Структурная схема БЗ приведена на рис. 14.1
Датчики тока служат для преобразования токов в цепях питания двигателя в напряжение. Первичные цепи датчиков тока образуются проводами, пропускаемыми через тороидальные магнитопроводы датчиков тока. Микроконтроллер с помощью коммутатора, пикового детектора и АЦП измеряет токи в силовых проводах фаз А, В и С. При этом коммутатор подключает для измерения одну из фаз, а пиковый детектор усиливает и запоминает на время аналого-цифрового преобразования уровни сигналов, снимаемых с датчиков тока. Значение максимального значения из измеренных фазных токов отображается на индикаторе. По измеренным значениям токов выявляются аварийные режимы работы двигателя: обрыв фазы и перегрузка по току. При появлении аварийных режимов вырабатывается сигнал "Блокировка", срабатывает реле Р, с помощью которого производится отключение магнитного пускателя. Клавиатура в устройстве предназначена для установки параметров защиты в цифровой форме. Параметры в процессе ввода отображаются на индикаторе, а по окончании ввода записываются во внутреннюю энергонезависимую память данных. В этой же энергонезависимой памяти накапливаются сведения о количестве аварийных отключений двигателя раздельно по токовой перегрузке и по обрыву фазы. Количества отключений по названным причинам отображаются на индикаторе во время нажатия соответствующих кнопок.
Рис. 14.1. Структурная схема БЗ:
ДТ-А – датчик тока фазы А; ДТ-В – датчик тока фазы В; ДТ-С – датчик тока фазы С; К – коммутатор; ПД – пиковый детектор; АЦП – аналого-цифровой преобразователь; МК – микроконтроллер; И – индикатор; Р – реле; Кл – клавиатура; УП – узел питания.
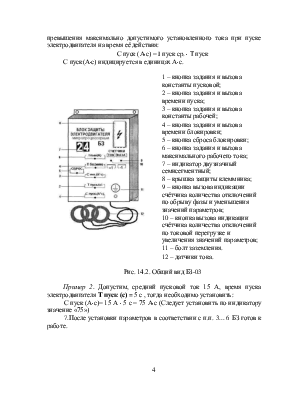
Расположение кнопок на панели управления показано на рис. 14.2.
2.4. Указания по применению и эксплуатации
1.Подключение и установка рабочего режима.
Подключить БЗ согласно схеме, приведённой на рис. 14.3, проводами с медной жилой сечением (1,5-2,5) мм2.
Внимание - схема дана для
подключения пускателя с катушкой, соответствующей междуфазному напряжению (на
лабораторном стенде uмф = 220 в), для
подключения пускателя с катушкой на ![]() , контакт
"4" блока защиты необходимо подключить к нулевому проводу сети.
, контакт
"4" блока защиты необходимо подключить к нулевому проводу сети.
Закрыть клеммник БЗ защитной крышкой и подать служебное питание ~220В тумблером SA1;
2.Нажав кнопку "I max(А)" и, удерживая её в нажатом положении, кнопками "+1" и "–1" установить по индикатору величину тока максимально допустимого для защищаемого электродвигателя. Ток индицируется в десятых долях Ампера.
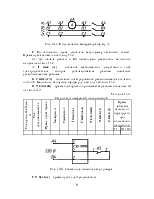
3. Нажав кнопку"С инт. (А×с)" и, удерживая её в нажатом положении, кнопками "+1" и "–1" установить по индикатору константу интегрирования, являющую собой произведение величины превышения максимально допустимого установленного тока вАмперахна время её действия в секундах:
Синт. (А×с) = (Iперегрузки – Imax) × Тперегрузки.
Пример 1. Допустим, установленный максимально допустимый рабочий ток Imax = 5 А и необходимо действие перегрузочного тока Iперегрузки = 8 А ограничить временем Тперегрузки = 10 с.
Тогда необходимо установить величину Синт.(А×с) = (8 А – 5 А) ´ 10 с = 30 А×с. (Естественно что, при действии иной перегрузки, например
Iперегрузки = 10 А, время действия перегрузки пропорционально сократится и составит: Тперегрузки = 30 А×с/(10А – 5 А) = 6 с. Константа индицируется вединицахА×с.
4. Нажав кнопку "Т бл.(мин)" и, удерживая её в нажатом положении, кнопками "+1" и "–1" установить по индикатору желаемое время блокировки (в минутах) – время, в течение которого БЗ после его срабатывания в аварийной ситуации не разрешает повторное включение защищаемого электродвигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.