Приобретение навыков программирования микропроцессорных устройств, работающих в реальном масштабе времени, на примере устройств генерации периодических сигналов.
2.1. Изучить следующие вопросы курса:
Технология программирования микропроцессоров.
Языки программирования.
Применение встроенных микропроцессоров в технике связи.
Литература
Цифровая и вычислительная техника / под ред. Э. В. Евреинова. - М.: Радио и связь, 1991, с. 300-301, 376-379, 428-433.
Калабеков Б. А. Микропроцессоры и их применение в системах передачи и обработки сигналов. - М.: Радио и связь, 1988, с. 308-315.
Указания по составлению микропрограммы генерации сигналов даны в п. 3.2.
2.3. Рассчитать максимальную частоту генерируемых сигналов, если тактовая частота процессора fп в устройстве МТ1804 равна 1 МГц. Указания даны в п. 3.1.
 |
 |
3.1. Цифровая обработка сигналов, в сравнении с аналоговой обработкой, обеспечивает более высокую точность, надежность и стабильность параметров сигналов. Микропроцессорная реализация цифровой обра-ботки отличается большой гибкостью, поскольку заменой программы нетрудно изменить выполняемую устройством функцию.
Одна из задач цифровой обработки сигналов - генерация сигналов заданной частоты и формы. Основные методы цифровой генерации сигналов: метод аппроксимации и табличный метод.
Метод аппроксимации использует представление периодического сигнала в аналитическом виде и выполнение вычислений в микропроцессоре по программе.
Например, достаточную точность аппроксимации синусоидального сигнала y = sin(wt) на интервале [-p/2, p/2] получают при вычислениях с использованием четырех членов ряда Маклорена:
y = x – x3/3! + x5/5! – x7/7!
Аппроксимация импульсных сигналов осуществляется чаще всего отрезками простейших функций. Например, прямоугольные импульсы с длительностью TИ, периодом следования T и амплитудой A могут быть аппроксимированы на интервале периода кусочно-линейной функцией
y = A 0 < t < TИ ;
y = 0 TИ < t < T .
Параметры генерируемого сигнала хранятся в ячейках ОЗУ микропроцессорного устройства (или в ПЗУ, если они не изменяются). Программа должна обеспечивать вычисление отсчётов функции с интервалом dt таким, чтобы число отсчётов за период сигнала T составляло несколько десятков. Переключением фрагментов или ветвей программы обеспечивается переход от одного отрезка функции к другому. Время формирования одного отсчета определяется числом тактов, затрачиваемых на выполнение самой длинной ветви программы. Диапазон генерируемых частот ограничен соотношением
fмакс = fп /(M·L), где fп - тактовая частота микропроцессора,
M - число тактов для формирования одного отсчета,
L - число отсчётов на протяжении периода сигнала.
В заключение цикла выполнения программы происходит вывод полученного цифрового отсчета сигнала. При необходимости получения аналогового сигнала устройство вывода содержит цифро-аналоговый преобразователь. Цифровые отсчёты сигнала могут использоваться и внутри МП-устройства, например, в другой программе.
Метод аппроксимации позволяет обходиться небольшим объемом ЗУ, а к его недостаткам относится значительное число арифметических и логических операций, затрачиваемых на формирование одного отсчета сигнала, что снижает максимальную частоту генерируемых сигналов.
Табличный метод генерации предполагает, что предварительно вычисленные цифровые отсчёты функции хранятся в постоянном ЗУ. Формирование очередного отсчета сводится к операциям подготовки адреса и чтения соответствующей ячейки ПЗУ.
Достоинством табличного метода является меньшее время, затрачиваемое на формирование отсчета и, как следствие, возможность генерации сигналов с более высокой частотой. Недостатком метода является необходимость иметь ПЗУ значительного объема.
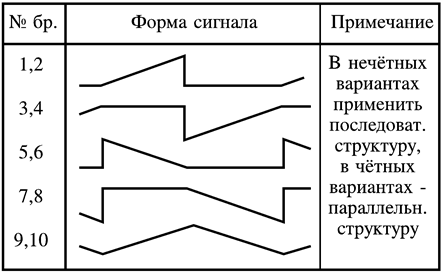
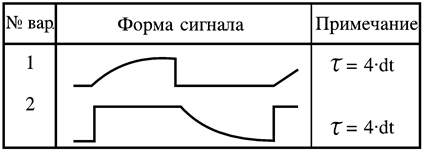
3.2. Рассмотрим вопросы составления программы генерации перио-дических сигналов простейшей формы, состоящей из двух отрезков элементарных функций при равных по длине интервалах. Физическая очевидность такой задачи благоприятна для начального изучения вопросов разработки МП-устройств, работающих в реальном масштабе времени.
Возможности микротренажёра МТ1804 достаточно скромны: 4-раз-рядный операционный блок позволяет иметь не более 2 4 =16 градаций представления функции (от 0000 до 1111); 4-разрядное устройство управления позволяет иметь микропрограмму не более, чем из 2 4 =16 микрокоманд.
Для более точного отображения заданной функции диапазон представления следует использовать полностью, т.е. от 0 до 15. На период генерируемой функции приходится некоторое число отсчётов функции. Номер отсчета должен отображаться состоянием счетчика циклов. Счетчик реализуется программно: его состояние сохраняется в выделенном для этой цели РОН, а изменение состояния производится с помощью АЛУ. Четырёхразрядный РОН позволяет организовать счетчик не более чем на 16 состояний. Для реализации счетчика в программе необходимы операции загрузки начального состояния, изменения состояния и контроля достижения конечного состояния. Для упрощения программы полезно использовать состояния счетчика от 0 до 15, а контролировать состояние 0. При этом число микрокоманд, реализующих счетчик, снижается до двух, т.к. загружать каждый раз начальное состояние не потребуется.
Для генерации двух отрезков функции необходимо иметь два фрагмента программы, которые будут переключаться по окончании работы счетчика. Алгоритм генерации может иметь два варианта структуры:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


