
1.4. Определение положения ротора и применение датчиков Холла.
Для определения положения полюсов на роторе вентильного двигателя постоянного тока устанавливаются дополнительные технические средства. В настоящее время применяются следующие датчики положения: элементы Холла; светодиоды и фототранзисторы (или фотодиоды); индуктивные датчики, чувствительные к изменению индуктивного сопротивления
1.4.1. Элементы Холла.
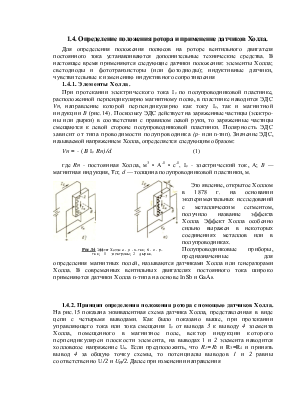
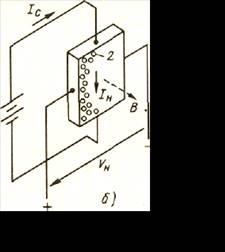
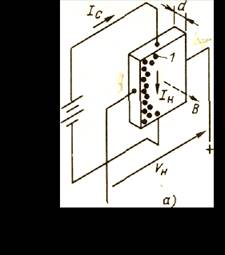
При протекании электрического тока Iс по полупроводниковой пластинке, расположенной перпендикулярно магнитному полю, в пластинке наводится ЭДС VH, направление которой перпендикулярно как току Iс, так и магнитной индукции В (рис.14) . Поскольку ЭДС действует на заряженные частицы (электроны или дырки) в соответствии с правилом левой руки, то заряженные частицы смещаются к левой стороне полупроводниковой пластинки. Полярность ЭДС зависит от типа проводимости полупроводника (р- или n-тип). Значение ЭДС, называемой напряжением Холла, определяется следующим образом:
VH= - (B IсRH)/d(1)
где RH- постоянная Холла, м3 • А-1 • с-1, Iс - электрический ток, А; В — магнитная индукция, Тл; d— толщина полупроводниковой пластинки, м.
|
 Это явление, открытое Холлом в 1878 г. на
основании экспериментальных исследований с
металлическим сегментом, получило название эффекта Холла. Эффект Холла
особенно сильно выражен в некоторых соединениях
металлов или в полупроводниках. Полупроводниковые приборы, предназначенные для определения магнитных
полей, называются датчиками Холла
или генераторами Холла. В современных вентильных двигателях постоянного тока широко применяются датчики Холла n-типа на основе InSb и GaAs.
Это явление, открытое Холлом в 1878 г. на
основании экспериментальных исследований с
металлическим сегментом, получило название эффекта Холла. Эффект Холла
особенно сильно выражен в некоторых соединениях
металлов или в полупроводниках. Полупроводниковые приборы, предназначенные для определения магнитных
полей, называются датчиками Холла
или генераторами Холла. В современных вентильных двигателях постоянного тока широко применяются датчики Холла n-типа на основе InSb и GaAs.
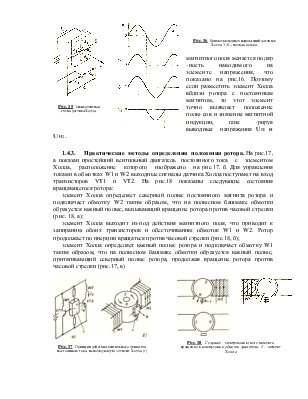
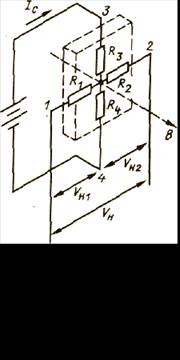
1.4.2. Принцип определения положения ротора с помощью датчиков Холла. На рис.15 показана эквивалентная схема датчика Холла, представленная в виде цепи с четырьмя выводами. Как было показано выше, при протекании управляющего тока или тока смещения Iс от вывода 3 к выводу 4 элемента Холла, помещенного в магнитное поле, вектор индукции которого перпендикулярен плоскости элемента, на выводах 1 и 2 элемента наводится холловское напряжение Uн. Если предположить, что R1=R2и R3=R4 и принять вывод 4 за общую точку схемы, то потенциалы выводов 1 и 2 равны соответственно U/2 и UH/2. Далее при изменении направления
|
|
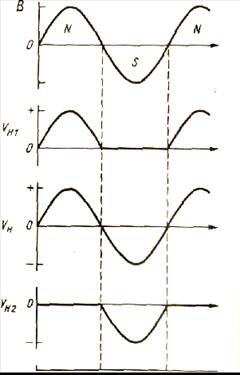
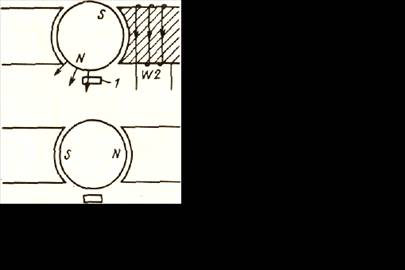
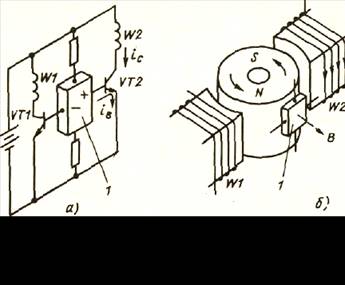
1.4.3. Практические методы определения положения ротора. На рис.17, а показан простейший вентильный двигатель постоянного тока с элементом Холла, расположение которого изображено на рис.17, б. Для управления токами в обмотках W1 и W2 выходные сигналы датчика Холла поступают на вход транзисторов VT1 и VT2. На рис.18 показаны следующие состояния вращающегося ротора:
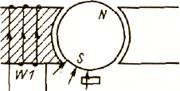
элемент Холла определяет северный полюс постоянного магнита ротора и подключает обмотку W2 таким образом, что на полюсном башмаке обмотки образуется южный полюс, вызывающий вращение ротора против часовой стрелки (рис. 18, а);
элемент Холла выходит из-под действия магнитного поля, что приводит к запиранию обоих транзисторов и обесточиванию обмоток W1 и W2. Ротор продолжает по инерции вращаться против часовой стрелки (рис.18, б);
элемент Холла определяет южный полюс ротора и подключает обмотку W1 таким образом, что на полюсном башмаке обмотки образуется южный полюс, притягивающий северный полюс ротора, продолжая вращение ротора против часовой стрелки (рис.17, в)
|
||||
|
||||
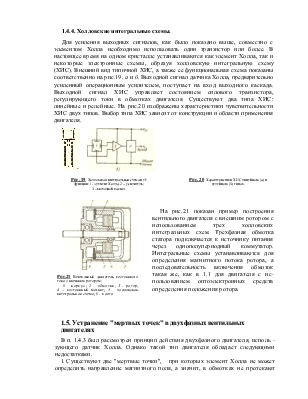
1.4.4. Холловские интегральные схемы.
Для усиления выходных сигналов, как было показано выше, совместно с элементом Холла необходимо использовать один транзистор или более. В настоящее время на одном кристалле устанавливаются как элемент
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.