|
Базис |
Х0 |
Х1 |
Х2 |
X3 |
S1 |
Z2 |
S3 |
Z3 |
Отношение |
|
S1 |
18,89 |
1,444 |
0 |
-0,111 |
1 |
0 |
0,222 |
0 |
x |
|
Z2 |
7,444 |
0,222 |
0 |
1,444 |
0 |
1 |
0,111 |
0 |
5,154 |
|
Х2 |
3,556 |
0,778 |
1 |
0,556 |
0 |
0 |
-0,111 |
1 |
6,4 |
|
F |
14,22 |
1,11 |
0 |
1,22 |
0 |
0 |
-0,444 |
0,444 |
|
|
Вводим : X3 Выводим: A2 |
|||||||||
Третья итерация:
|
Базис |
Х0 |
Х1 |
Х2 |
X3 |
S1 |
Z2 |
S3 |
Z3 |
Отношение |
|
S1 |
19,46 |
1,462 |
0 |
0 |
1 |
0,077 |
0,231 |
-0,231 |
13,32 |
|
X3 |
5,154 |
0,154 |
0 |
1 |
0 |
0,692 |
0,077 |
-0,077 |
33,5 |
|
Х2 |
0,692 |
0,692 |
1 |
0 |
0 |
-0,385 |
-0,154 |
0,154 |
1 |
|
F |
7,923 |
0,923 |
0 |
0 |
0 |
-0,846 |
-0,538 |
0,444 |
|
|
Вводим : X1 Выводим: X2 |
|||||||||
Конечная таблица (кол-во итераций 3 )
|
Базис |
Х0 |
Х1 |
Х2 |
X3 |
S1 |
Z2 |
S3 |
Z3 |
Отношение |
|
S1 |
18 |
0 |
-2,11 |
0 |
1 |
0,889 |
0,556 |
-0,556 |
0 |
|
X3 |
5 |
0 |
-0,222 |
1 |
0 |
0,778 |
0,111 |
-0,111 |
0 |
|
Х1 |
1 |
1 |
1,444 |
0 |
0 |
-0,556 |
-0,222 |
0,222 |
0 |
|
F |
7 |
0 |
0,133 |
0 |
0 |
0,333 |
0,333 |
-0,333 |
|
|
Оптимальное значение Ц.Ф. = 7 |
|||||||||
Х1*=1
X2*=0
X3*=5
Ответ: план, обеспечивающий минимальное потребление воды равен 7.
Все расчёты проводили в Excel.
Если число переменных в задаче меньше или равно 2, то возможно её графическое решение на плоскости, а именно в координатной системе X1;X2.
f (х)=2x1-3x2=>min
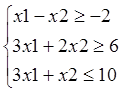
При графическом решении задачи отмечают следующие этапы:
1. - строят координатную плоскость X1;X2
- выбирают подходящий масштаб
- наносят на плоскость систему ограничений задачи, следующим образом:
a) сначала строят границу полученной плоскости в виде прямой
b) с помощью контрольной точки выбирают нужную полуплоскость
Таким образом строят все ограничения.
2. - выбирают общую для всех ограничений область, которая и будет областью допустимых решений (ОДР) задачи.
В данной задаче пятиугольник ABCDE. Каждая точка этой области является допустимым решением задачи. Нам нужно найти ту (те) точку (и) в которой функция принимает значение минимум . Для этого надо выполнить пункт 3.
3. - на чертеже строят два произвольных значения Z (целевой функции), для того чтобы определить направления её роста. Значения задают произвольно:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.