ЗАДАЧА 3
Для асинхронного двигателя с короткозамкнутым ротором, параметры которого представлены в таблице 12, получающего питание от источника напряжения, необходимо решить 6 заданий.
Таблица 12 – Технические данные асинхронного двигателя с короткозамкнутым ротором
|
Вариант |
Двигатель |
Рн, кВт |
nн, об/мин |
|
I1н, А |
|
||
|
пусковой |
номи-нальный |
хол. хода |
||||||
|
7 |
МТКМЗП-6 |
7.5 |
930 |
2.8 |
4.9 |
0.76 |
0.83 |
0.09 |
|
Статор |
Ротор |
Jдв, кг∙м2 |
|||||
|
I1н, А |
I1х, А |
R1, Ом |
X1, Ом |
I`2н, А |
R`2ф, Ом |
X`2ф, Ом |
|
|
17.5 |
11.8 |
0.9 |
0.663 |
13.6 |
0.86 |
0.75 |
0.212 |
1). Рассчитать и построить естественные статические электромеханическую I2¢=f(S) механическую характеристику M=f(S).
РЕШЕНИЕ
Скорость идеального холостого хода, для n0=1000 об/мин
![]()
Активное сопротивление короткого замыкания
![]()
Индуктивное сопротивление короткого замыкания
![]()
Критическое скольжение, знак “+” соответствует двигательному, а знак “–” генераторному режиму

Номинальное скольжение
![]()
Коэффициент, входящий в формулу Клосса
![]()
Критический момент двигателя, знак “+” соответствует двигательному, а знак “–” генераторному режиму

Естественная механическая характеристика, формула Клосса
Естественная электромеханическая характеристика
На рисунке 25 приведена естественная механическая характеристика, а на рисунке 26 электромеханическая характеристика двигателя.

Рисунок 25 – Естественная механическая характеристика

Рисунок 26 – Естественная электромеханическая характеристика
2). Рассчитать и построить две механические характеристики динамического торможения (Mmax1=Mке и Mmax2=0.7∙Mке). Определить параметры источника постоянного тока для этих случаев.
РЕШЕНИЕ
Режим динамического торможения асинхронного двигателя является частным случаем питания обмоток статора от источника тока, когда частота тока статора равна нулю. Расчет механических характеристик в этом случае будет вести с учетом нелинейности кривой намагничивания. На рисунке 27 приведена универсальная кривая намагничивания и зависимость реактивного сопротивления цепи намагничивания.

Рисунок 27 – Универсальная кривая намагничивания и зависимость реактивного сопротивления цепи намагничивания
Ток возбуждения в режиме динамического торможения
![]()
Обмотки статора включены по схеме «звезда», следовательно, эквивалентный ток статора определим по формуле
![]()
ЭДС фазы статора
![]()
Реактивное сопротивление цепи намагничивания
![]()
Эквивалентный ток статора в относительных единицах к току холостого хода
![]()
Основные расчетные формулы для режима динамического торможения
Электромагнитный момент двигателя
Угловая скорость двигателя
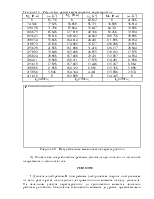
Результаты расчетов представлены в таблице 13.
Таблица 13 – Рассчитанные данные
|
|
|
|
|
|
|
|
0.2 |
1.30 |
23.229 |
27.920 |
-40.523 |
109.649 |
|
0.4 |
1.28 |
22.872 |
27.625 |
-83.845 |
51.878 |
|
0.6 |
1.24 |
22.157 |
27.120 |
-120.851 |
34.691 |
|
0.8 |
1.12 |
20.013 |
26.349 |
-141.825 |
27.904 |
|
1.0 |
1.00 |
17.869 |
25.343 |
-152.459 |
24.013 |
|
1.2 |
0.86 |
15.367 |
24.051 |
-154.000 |
22.068 |
|
1.4 |
0.80 |
14.295 |
22.563 |
-152.254 |
19.060 |
|
1.6 |
0.74 |
13.223 |
20.741 |
-148.046 |
16.563 |
|
1.8 |
0.69 |
12.329 |
18.510 |
-138.669 |
14.083 |
|
2.0 |
0.64 |
11.436 |
15.690 |
-121.197 |
11.578 |
|
2.2 |
0.60 |
10.721 |
11.904 |
-94.861 |
8.514 |
|
2.4 |
0.56 |
10.006 |
5.391 |
-43.760 |
3.785 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.