При ручном управлении СЭП обеспечивает пуск синхронного двигателя при полном (прямой) или пониженном (легкий или тяжелый) напряжениях на обмотке статора, с автоматической подачей возбуждения с контролем тока статора и форсировку возбуждения до 1,75 Iв ном при снижении напряжения питания двигателя до 15—20% от номинального значения,
Алгоритмы управления формирует задатчик статического режима S. Он получает сигналы обратных связей по току питающей сети Uтп, напряжению Uп и току Uтс статора и вырабатывает сигналы управления, пропорциональные напряжению статора и одной из следующих величин: полному, активному и реактивному токам статора; (углам сдвига фаз питающей сети φп и двигателя φд и реактивному току питающей сети.
Задатчик угла Sφ работает аналогично задатчику статического режима S и предназначен для изменения угла нагрузки, когда S изменяет другие переменные
При превышении током ротора его номинального значения используется ограничитель тока ротора AF, который с выдержкой времени, включает отрицательную обратную связь по току ротора, снижающую ток ротора до номинального значения.
Алгоритм управления формируется задатчиком статического режима

ЭДС возбудителя СД при этом определяется
Eв= uивkyknв
Стабилизация напряжения питания при спокойной нагрузке осуществляется за счет отрицательной обратной связи по напряжению
uув =
+ kн(Uзп – uп)
Отрицательная обратная связь по напряжению в комбинации с отрицательной связью по току возбуждения позволяет при резко переменной нагрузке стабилизировать реактивную мощность за счет изменения Uзп в функции изменения реактивного тока статора
Для создания динамических режимов используются положительные обратные связи по производной и квадрату активной составляющей тока статора, обеспечивающие соответственно демпфирование колебаний ротора и форсировку тока возбуждения СД. Тогда напряжение управления АРВ
uув =
![]()
+ kн(Uзп – uп) + kта1 diа /dt + kта 2 iа2
Для регулирования реактивной мощности (Q = const) в электроприводах с резкопеременной нагрузкой используются отрицательные обратные связи по току возбуждения и по реактивному току статора, а для требуемых динамических режимов используется еще связь по производной и квадрату активной составляющей тока статора, обеспечивающие демпфирование колебаний ротора и форсировку тока возбуждения
uув =
+ kтр(Iзр – iр) + kта1 diа /dt + kта 2 iа2
Система управления синхронного электропривода с подчиненным регулированием координат
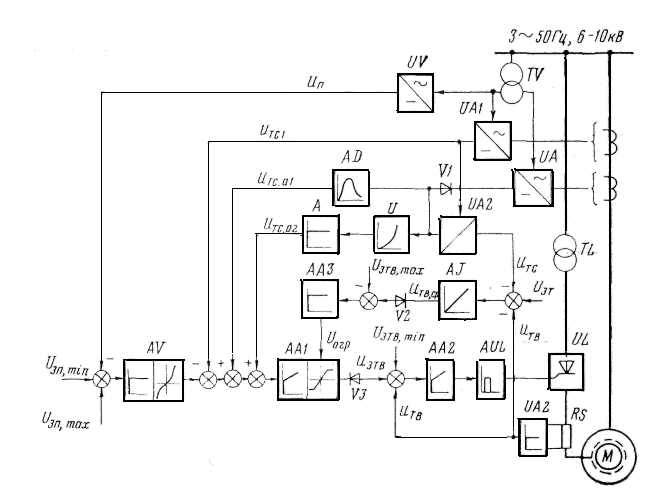
Для улучшения динамических режимов на регулятор АА1 дополнительно вводятся сигналы, пропорциональные производной uта,1 и квадрату uта,2 активной составляющей тока статора, обеспечивающие соответственно демпфирование колебаний ротора и форсировку тока возбуждения при набросе нагрузки на СД
Минимальное значение тока возбуждения задается в виде уставки Uзтв,min; подаваемой на регулятор АА2, а максимальное — через регулятор АА1 в виде напряжения ограничения Uогр.
Это напряжение формируется в дополнительном пропорциональном регуляторе тока возбуждения ААЗ, на вход которого подаются уставка максимального значения тока возбуждения Uзтв,max и напряжение обратной связи uтв,ср , пропорциональное среднеквадратичным значе ниям токов статора и ротора, получаемое с интегратора AJ
На входе AJ напряжение задания тока Uзт сравнивается с сигналами, пропорциональными полному току статора uтс и току возбуждения ротора uтв
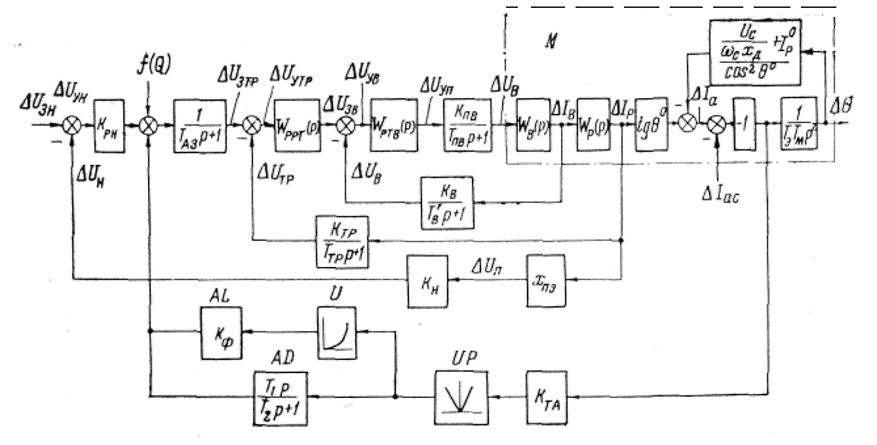
Цепь возбуждения двигателя

Цепь реактивного тока
Tв = Lв/Rв—постоянная времепи цепи возбуждения; Тв' — постоянная времени, учитывающая взаимную индуктивность обмоток ротора и статора; Тв" — постоянная времени, учитывающая не мгновенное нарастание Δ uв .
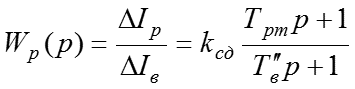
kсд — коэффициент СД; Трт — постоянная времени датчика реактивного тока
Напряжение питания СД приближенно оценивается по реактивному току статора
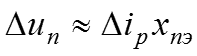
хпэ — эквивалентное фазное реактивное сопротивления питающей сети
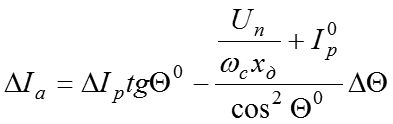
Цепь активного тока
Iр° — фиксированное установившееся значение реактивного тока статора; ωс — угловая частота тока статора; хд — реактивное фазное сопротивление двигателя
Электромагнитный момент СД оценивается активным током
ΔI а - ΔIас = -ТэТм р2ΔΘ
За малую некомпенсируемую постоянную времени принимается Tμ = Tпв + Tв'+ Tв" + Tтр

Передаточная функция замкнутого оптимизируемого контура тока возбуждения

Регулятор реактивного тока принимается пропорционально-интегральным с передаточной функцией
Регулятор напряжения выполняется пропорциональным с нелинейной характеристикой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.