Сопср вычислять при заранее известных значениях скорости Umax и подачи Smax, определяемых кинематикой станка.
Способ определения средневзвешенных значений штучного времени и себестоимости операции зависит от вида оптимизируемых параметров. При дискретном множестве значений скорости и подачи, например, в качестве Дит.ср берется среднее значение /шт.р для некоторого числа пар // значений и я s:
|
ьшт.ср — |
|
1 IT |
|
SiV, |
|
l/m |
В случае оптимизации непрерывных значений скорости и подачи, соответственно изменяющихся в интервалах [u^n, Umax] [smm, s„,ax], берется интегральное среднее
"тах _ Sniax , -,
/шт.ср= $ \ ^(^^^'"^^/(ип.ах-"min L imin us J
(S„ - Sm\n ) •
Аналогично определяется интегральное среднее значение для себестоимости Соп7ср.
|
,!ак "i()2?. |
|
257 |
После приведения критериев оптимальности к безразмерному виду получим следующие зависимости:
|
^^L+xiu'"" VS |
|
(10.43) |
|
(10.44) |
^l.^x^""-^^""-', us
|
С С, |
|
отно- |
tmT.p
—относительное штучное время; т-
где т==
Гшт.ср сительная себестоимость;
|
Zl : |
|
A-lA, tun.cp |
|
• ', Z2== |
|
_k^R\ |
|
С |
|
on.cp |
|
feifez tuiT.cp |
|
_fe,/e2 |
|
С |
|
on cp |
В настоящее время известны различные методы свертки критериев. В данной работе использовался один из наиболее простых методов, основанный на построении совмещенного критерия в виде суммы частных критериев f== т + о (аддитивный критерий). Приведенная зависимость справедлива для критериев оптимальности, если они имеют в условиях рассматриваемой задачи одинаковую значимость. Однако это не всегда может быть выполнено. Поэтому при необходимости отразить в совмещенном критерии различную «важность» показателя штучного времени (производительности) т и себестоимости о вводятся так называемые весовые коэффициенты ^i и -у^ч, устанавливаемые на основе экспертных оценок.
В общем случае совмещенный критерий оптимальности будет иметь вид
/^XiT+XaO.
Подставив в эту зависимость выражения (10.44) и (10.43) для т и ст, получим
F=A/vs+Bu[/m~ls•''/'"-\, (10.45)
где A=xi2i+X2Z,; B^Xi-^+Xa-^i.
Таким образом, описанная задача оптимизации по двум критериям может быть сведена к минимизации функции F(u,s).
При анализе целевых функций для оптимизации режимов резания необходимо учитывать технические ограничения, которые определяют область существования оптимальных решений. Определяемые параметры и и s должны удовлетворять ряду технических ограничений, которые могут быть представлены в общем случае в виде системы неравенств
|
(10.46) |
Ут.п^У^тах. sm^n ^S s ^а ^ах ' У^'</?„ (t=T7").
258
В совокупности технические ограничения дают на плоскости с координатами и и s криволинейный многоугольник решений. Следует подчеркнуть, что задача минимизации функции (10.45) на криволинейном многоугольнике является принципиально нелинейной задачей. Если система неравенств (10.46) переходом к логарифмическим координатам может быть преобразована к системе линейных неравенств, как это было показано в предыдущем параграфе, то функция F из формулы (10.45), напротив, не может быть сведена к линейной ни заменой переменных, ни каким-либо разумным в данной постановке задачи приемом линеаризации. Таким образом, здесь возникает задача нелинейной оптимизации. Причем функция /•', будучи бесконечно дифференцируемой в области, описываемой системой неравенств (10.46), может достигать своего наименьшего значения в критической точке либо на границе области. Покажем, исследовав линии уровня функции F(u,s), что она не имеет точек локального экстремума при положительных значениях и и s.
Рассмотрим некоторую линию уровня F(v,s)=^K и умножим полученное равенство на us. Тогда уравнение рассматриваемой линии запишется в виде
(10.47)
Введем обозначение vs=q и после преобразований получим
Bv(\-ys'^/m=(Kq—A)-y'/m. (10.48)
Анализ этого уравнения позволяет сделать первые выводы о качественном поведении функции F. Зафиксировав величину q, из уравнения (10.48) видим, что при 1—Уи > 0 (это характерно для всех методов механической обработки) параметр К. убывает при уменьшении значений и.
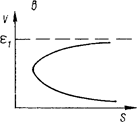
Для уточнения общего вида линий уровня функции F проведем дальнейшее исследование выражения (10.48). Верхняя ветвь линии уровня функции F зависит от соотношения коэффициентов ус/т, определяемых условиями обработки (рис. 10.8). При этом следует рассматривать три случая:
|
|
|
|
|
|
|
259 |
Рис. 10.8. Виды линий уровня целевой функции F (и, s)
1. yv/m > 1. В этом случае при q->-oo выражение о*1—^/'".-^, а значит, и и->-0. Общий вид линии уровня функции F будет таким, как показано на рис. 10.8, а.
2. у„/от<1 (отметим, что всегда у а/т >0). В этом случае при q->-oo выражение и^-^^-гоо и, следовательно, и-^оо. Линия уровня для этого случая показана на рис. 10.8, б.
3. у^/т=\. В этом случае при q->-oo выражение Во0 -^^"-^К,, значит, у стремится
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.