Создание конструкций тележек со свободно вращающимися на оси колесами поставило новые задачи в области
динамики их взаимодействия с рельсами. В ходе испытаний выявилось
полное отсутствие направляющего действия такой колесной пары в рельсовой
колее. Поэтому гребни правого и левого колес в зависимости от перекоса оси в
раме тележки постоянно соприкасаются с головкой рельса. В результате
постоянного взаимодействия гребня одного из колес с рельсом происходит его преждевременный износ. Например, на
первой партии венгерских дизель-поездов серии Д на трехосных тележках средняя колесная пара была оборудована свободно вращающимися на оси колесами. Через каждые 40-50
тыс. км пробега бандажи этих колес приходилось обтачивать из-за предельного износа гребней. Поэтому в дальнейшем от таких колесных пар пришлось отказаться.
За рубежом были испытаны различные способы восстановления направляющего действия пары со свободно вращающимися на оси колесами, в числе которых частичная фрикционная связь правого и левого колес, увеличенная конусность бандажей, установка раздельных осей и др. Однако удовлетворительного решения проблемы получено не было. В нашей стране также пытаются решить проблему различными путями. В частности, было предложено сажать бандажи на колесные центры по скользящей посадке с нанесением твердой смазки на контактные поверхности, с тем чтобы они могли проскальзывать относительно друг друга в кривых участках пути. Однако ощутимых результатов это предложение пока не дало.
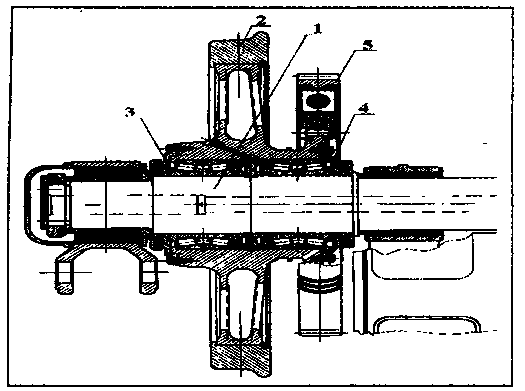
Неплохие результаты по стабилизации движения пары со свободно вращающимися на оси колесами получены во ВНИТИ на экспериментальном электровозе ВЛ60К-1699, испытанном в локомотивном депо Муром Горьковской дороги. Устройство экспериментальной пары показано на рис. 3. Она состоит из не вращающейся оси 1, правого и левого колес 2 (на рис. 3 показана только левая половина колесной пары), установленных на оси посредством конических подшипников качения 3 и 4. На ступицах колес 2 посажены упругие зубчатые колеса 5, венцы которых соединены между собою валом якоря электродвигателя с посаженными на хвостовиках ведущими шестернями. При этом обеспечивается эластичная связь правого и левого вращающихся на оси колес с коэффициентом жесткости 5,4-105Нм/рад.
Динамические испытания показали, что в прямых участках пути пара со свободно вращающимися на оси колесами и упругой связью между ними сохраняет, как и традиционная колесная пара, направляющие свойства, но частота извилистого ее движения снижается почти в два раза, что благоприятно сказывается на горизонтальной динамике локомотива. Тем не менее в кривых, после того как относительная упругая закрутка колес достигала предела по сцеплению, скольжение колеса по рельсу остается таким же, как у традиционной колесной пары.
СТАБИЛИЗИРОВАТЬ движение колесной пары с кинематически не связанными вращающимися колесами удалось на катковом стенде ВНИТИ путем обеспечения принудительных колебаний оси в горизонтальной плоскости. Этот стенд представляет собой закрепленный на станине колесно-моторный блок, бандажи которого обточены по профилю головки рельса Р50. К ним прижимается пружинами верхняя пара с вращающимися на оси колесами, бандажи которых имеют конусность 1:20. Левая букса невращающейся оси связана со станиной поводками с высокой продольной жесткостью. Правая соединена со штоком пневмоцилиндра, амплитуду А и частоту f колебаний которого можно регулировать в пределах А=2-5 мм; f=3 Гц. При А=2,6 мм и f=1,4 Гц пара со свободно вращающимися на оси колесами совершает принудительное извилистое движение, не касаясь гребнями бандажей боковых торцов колес нижней колесной пары вплоть до скорости движения 120 км/ч.
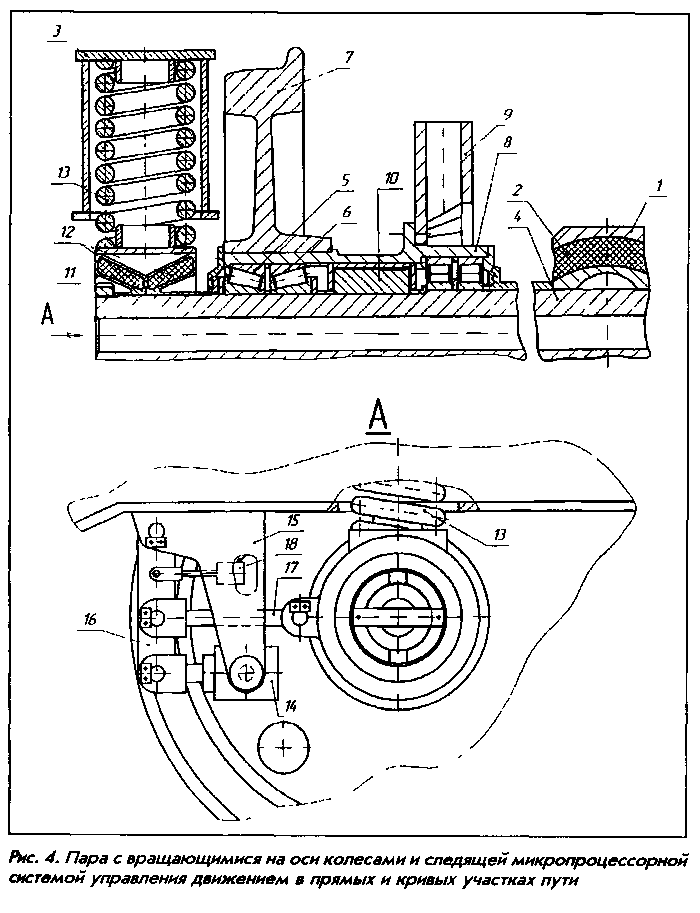
На основе этой разработки авторами статьи предложена следящая система микропроцессорного управления движением пары со свободно вращающимися на оси колесами применительно к вагонам электропоездов. На рис. 4 показана эта колесная пара. Она снабжена центральной тягой 1 с резиновыми элементами 2 в шарнирах, которые обеспечивают оптимальные характеристики жесткости поперечной ее связи с рамой тележки 3. Тяга, кроме того, передает продольные силы торможения на раму тележки. Вращающиеся на оси 4 на конических подшипниках 5 и 6 колеса 7 объединены втулкой 8 с тормозными дисками 9. Для повышения уровня безопасности движения конические подшипники дублированы радиально-упорными подшипниками скольжения 10, которые вступают в работу лишь в случае повреждения подшипников качения. При этом специальный температурный датчик, которыми оснащены все колесные пары, извещает машиниста по монитору о неисправности конкретного колеса. Вместо букс на внешних консолях оси смонтированы упругие опоры 11 с коническими резиновыми элементами 12. На них непосредственно опираются пружины 13 первой ступени рессорного подвешивания.
К одной из концевых опор присоединен исполнительный привод следящей микропроцессорной системы управления. Привод состоит из гидроцилиндра 14, шарнирно подвешенного на кронштейнах 15 рамы тележки. Его шток соединен с рычагом 16 увеличителя хода поршня гидроцилиндра, а рычаг шарнирно связан тягой 17 с концевой опорой невращающейся оси. Два других гидроцилиндра следящей системы шарнирно соединяют раму тележки с кузовом 9 (на рис. 4 не показаны). За состоянием системы следит датчик 18.
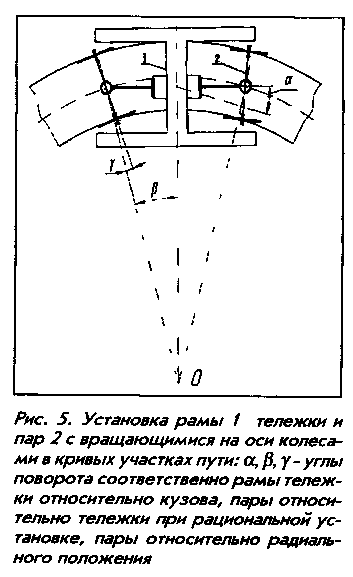
РАБOTAET следящая система следующим образом. В прямых участках пути по сигналам от магниторельсовых датчиков микропроцессор по жесткой программе вырабатывает такие сигналы для исполнительных гидроцилиндров 14, которые своевременно поворачивают не вращающиеся оси 4 вокруг центральных тяг 1 так, чтобы гребни колес 7 не касались боковых граней рельсов. При подходе к кривому участку пути головка, установленная на тележке, считывает с путевого блока памяти информацию о параметрах этого участка. Одновременно в микропроцессор поступают сведения о скорости движения поезда. В соответствии с полученными данными вырабатывается команда на поворот в радиальное положение рамы тележки на угол а и пар со свободно вращающимися на оси колесами на угол у, несколько больший радиальной их установки (рис. 5). Скорость поворота рамы и пар такова, что эти процессы выполняются в пределах переходных кривых как при входе в кривую, так и при выходе из нее. Дополнительный угол поворота у зависит от скорости движения, и для конкретных условий движения микропроцессором вычисляется оптимальное его значение. Угол поворота пары у по отношению к радиальной установке (3 обеспечивает минимально возможное взаимодействие гребней колес с головкой наружного рельса с точки зрения трения и износа.
Внедрение следящей системы микропроцессорного управления движением колесных пар на локомотивах и электропоездах позволит кроме уменьшения сопротивления движению резко сократить фрикционное взаимодействие гребней колес с боковыми гранями рельсов. В результате бандажи будут обтачиваться по величине предельно допустимого проката после пробега 600-800 тыс. км. Срок окупаемости следящей микропроцессорной системы управления движением пар со свободно вращающимися на оси колесами согласно расчетам применительно к вагонам электропоездов составит не более четырех месяцев работы в эксплуатации.
|
|
|
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.