3.4 ФП на микроуровне
Частицы Х-элемента в ОЗ в течение ОВ, которые контактируют с ДП, должны подвергаться большому давлению, чтобы перемешать ДП датчика, а частицы Х-элементы, которые контактируют с ИО, не должны подвергаться сильному давлению, чтобы не оказывать влияния на перемещение ИО.
3.5 Формулировка ИКР-2
Частицы Х-элемента в процессе перемещения ИО должны сами преобразовывать слабое давление ИО в сильное давление на ДП датчика.
4 Мобилизация и применение ВПР
4.1 ММЧ
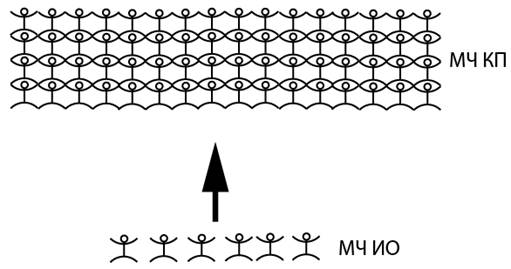
Рисунок 15 – ММЧ, исходная система.
Разреженные МЧ ИО характеризуют собой слабое давление, которое он может оказывать на массивные плечи датчика, которые изображены большим массивом сцепленных человечков. МЧ ИО необходимо сдвинуть МЧ КП. Понятно, что для этого им нужна помощь.
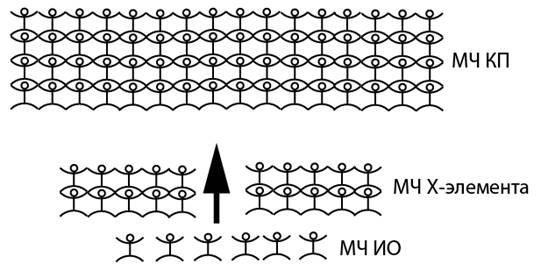
Рисунок 16 – ММЧ, модифицированная система.
На этом рисунке МЧ ИО «позвали» на помощь других, более «сильных» МЧ Х-элемента, которым они передали свое намерение сдвинуть МЧ КП.
После моделирования маленькими человечками становиться ясно, что представляет собой Х-элемент.
НТР10: Это комбинация чувствительных датчиков давления, которые устанавливаются на КП, и некоего источника механической энергии (электродвигатель, электромагнит и т.д.), который будет приводить в движение плечи датчика. Датчики давления крепятся на КП так, чтобы ИО соприкасался с ними. Так только ИО начнет перемещаться, датчики посылают сигнал на двигатель, которые начинает разводить плечи датчика. Как только давление уменьшается до номинального значения, двигатель останавливается. Такое решение позволяет сделать плечи достаточно длинными для точного перемещения, не заботясь об усилии, которое может оказывать ИО. Подбор чувствительных датчиков давления и прецизионного двигателя является инженерной задачей.
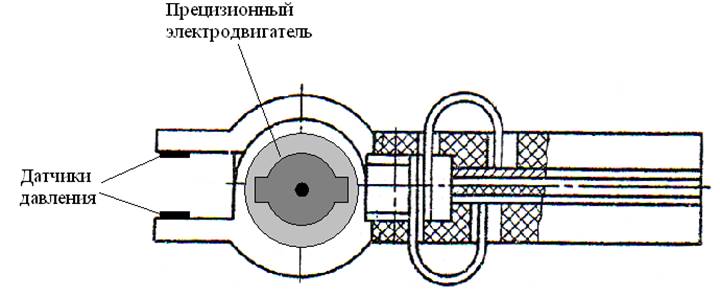
Рисунок 17 – Конструкция датчика перемещений из НТР 10.
4. Вепольный анализ
4.1 Построение веполей
Хорошо работающая система должна образовывать полный веполь. Найдем в исходной ТС неполный веполь и сделаем его полным.
В1 – пластины 1 и 2, а точнее место, где они соединяются. П1 – механическое поле трения. Трение вредно воздействует на пластины 1 и 2, увеличивая усилие, которое необходимо приложить для их перемещения.

Рисунок 18 – Неполный веполь.
Чтобы система стала полным веполем, введем второе вещество В2, которое должно уничтожить или минимизировать вредное воздействие П1 на В1.
Рисунок 19 – Полный веполь.
Второе вещество В2, которое минимизирует трение между осью и насаженной на нее деталью, очевидно, является подшипник.
НТР 11: для минимизации сопротивления силы трения между пластинами 1 и 2, предполагается использовать подшипники при креплении пластин 1 и 2 к общей оси. Это поможет существенно повысить точность датчика при измерении перемещения объектов с малым усилием перемещения.
4.2 Разрушение веполей
Решим ту же задачу методом разрушения веполей.

Рисунок 20 – Исходный полный веполь.
В1 – пластины 1 и 2, В2 – ось, на которую они насажены. П1 – механическое поле трения, которое возникает между пластинами и осью. Чтобы устранить вредное воздействие, введем новое вещество В3.

Рисунок 21 – Модифицированный веполь.
Новое вещество должно устранять (или минимизировать) трение между пластинами и осью. Получаем такое же решение, как и в задаче на построение – подшипник.
5 Морфологический анализ
Составим таблицу, в которой совместим элементы исходной ТС и их свойства.
Таблица 1.
|
Свойства Элементы |
Плоские |
Круглая |
Раздвижной |
Прово-дящие |
Диэлектри-ческая |
|
Пластины |
+ |
- |
+ |
- |
+ |
|
Катушка |
- |
+ |
- |
+ |
- |
|
Конденсатор |
+ |
- |
+ |
+ |
- |
|
Пружины |
- |
+ |
- |
+ |
- |
|
Прокладка |
+ |
- |
- |
- |
+ |
На основе анализа таблицы сделаем вывод, что из 25вохможных вариантов исполнения элементов реализовано 12. То есть, потенциально существует 13 новых решений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.