МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ МЕХАНИКИ И
ОПТИКИ
|
Кафедра |
Систем Управления и Информатики |
Группа |
5145 |
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
|
по курсу «Управление инновационными процессами» |
|
Автор курсового проекта |
|
(подпись) |
|
|
Руководитель |
|
(подпись) |
|
|
“ |
“ |
20 |
07 |
г. Санкт-Петербург, 200 |
7 |
г. |
|
Курсовой проект выполнен с оценкой |
||||||||
|
Дата защиты “ |
“ |
20 |
07 |
г. |
||||
Содержание
1 Принцип действия устройства…………………………………………………3
2 Анализ устройства по законам развития технических систем……………….5
2.1 Закон полноты частей системы………………………………………………5
2.2 Закон энергетической и информационной проводимости ……………..….5
2.3 Закон согласования-рассогласования………………………………………..7
2.4 Закон увеличения степени идеальности ТС…………………………………7
2.5 Закон неравномерности развития ТС ……………………………………...10
2.6 Закон повышения динамичности и управляемости ТС …………………..10
2.7 Закон свертывания-развертывания ………………………………………...11
2.8 Закон перехода на микроуровень и использование полей ……………… 12 3 Устранение технического противоречия при помощи АРИЗ………………13
4 Вепольный анализ……………………………………………………………..19
5 Морфологический анализ……………………………………………………..21
6 Анализ решения при помощи оператора «размеры-время-стоимость»……22
7 Описание учебного изобретения……………………………………………...23
8 Вывод…………………………………………………………………………...24
Литература…………………………………………………………………….…25
1 Принцип действия устройства
В описании к патенту № 1173168А, МКИ G 02 B 7/08 (по заявке № 3406668/1828 от 09.03.82, авторы Н. Н. Пренцлау и Н. И. Матушкин) представлено устройство «Датчик перемещений», чертеж конструкции которого представлен на рисунке 1. Датчик выполнен в виде двух диэлектрических пластин 1 и 2, имеющий такую форму, что они образуют короткие плечи 3 и 4, и длинные плечи 5 и 6. Пластины соединены общей осью 7, которая одновременно служит каркасом для катушки индуктивности 8. Соединение выполнено таким образом, что при сближении коротких плеч 1 и 2 длинные плечи 5 и 6 раздвигаются относительно друг друга. В исходном положении датчика длинные плечи 5 и 6 плотно прилегают друг к другу. На внутренних поверхностях длинных плеч укреплены обкладки 9 и 10 конденсатора, разделенные диэлектрической пластиной 11, прикрепленной к одной из обкладок. Выводы 12 и 13 катушки индуктивности соединены с обкладками конденсатора через пружины 14 и 15. Пружины выполнены в виде скоб и соединяют обкладки 9 и 10 конденсатора с оппозитными диэлектрическими плечами 5 и 6 соответственно. Пружины также устраняют люфт в конструкционных соединениях.
Датчик
работает следующим образом: при воздействии источника перемещений на короткие
плечи 3 и 4 расстояние между ними сокращается, что приводит к увеличению
расстояния между обкладками конденсатора 9 и 10, что приводит к изменению
емкости. Конденсатор последовательно соединен с катушкой индуктивности, образуя
колебательный контур. Принципиальная электрическая схема контура приведена на
рисунке 2. При изменении емкости конденсатора, по формуле ![]() изменяется
резонансная частота колебательного контура. По ее изменению и судят о величине
перемещения. На рисунке 2 представлена принципиальная схема электрической части
датчика.
изменяется
резонансная частота колебательного контура. По ее изменению и судят о величине
перемещения. На рисунке 2 представлена принципиальная схема электрической части
датчика.
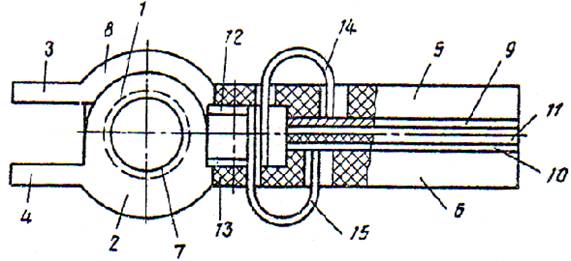
Рисунок 1 – Конструкция датчика перемещений.
Рисунок 2 – Резонансная схема измерения.
2 Анализ устройства с точки зрения проявления основных законов развития технических систем
2.1 Закон полноты частей ТС
Формулировка закона: необходимым условием принципиальной жизнеспособности ТС является наличие и минимальная работоспособность основных частей системы: двигателя, трансмиссии, рабочего органа и органа управления.
Изделие – это то, что обрабатывается в данной ТС. Очевидно, что в нашем случае это объект, перемещение которого измеряется датчиком. Рабочим органом в данной системе являются обкладки конденсатора, соединенные с катушкой индуктивности, т.к. именно они перемещаются в процессе измерения перемещения и выдают финальный результат работы датчика. Сам корпус датчика, т.е. пластины 1 и 2 выполняют как роль двигателя, так и роль трансмиссии. Если мысленно разделить пластины на 2 части, то двигателем будут короткие плечи 3 и 4, а трансмиссией – длинные плечи 5 и 6. Источником механической энергии для ТС, очевидно, является внешнее действие объекта измерения на короткие плечи 3 и 4. Кроме этого, на датчик еще подается напряжения для функционирования резонансной схемы. В силу того, что рассматриваемое устройство является датчиком, управление им в чистом виде не требуется, однако можно рассматривать сам процесс измерения перемещения как управления. Тогда, короткие плечи 3 и 4 пластин 1 и 2 выполняют также роль органа управления. Таким образом, с точки зрения закона, система является полной.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.