Из (7) может быть получено и уравнение механической характеристики
 (8)
(8)
где ![]() .
.
При работе на низких скоростях, что характерно для моментных
двигателей, ![]() и
и ![]() уравнение
механической характеристики принимает вид
уравнение
механической характеристики принимает вид
 .
.
 Это приближенное
уравнение соответствует уравнению механической характеристики коллекторного
двигателя постоянного тока независимого возбуждения. Реальные характеристики
вентильного двигателя (8) достаточно хорошо совпадают с приближенными только в
первом квадранте координатной системы
Это приближенное
уравнение соответствует уравнению механической характеристики коллекторного
двигателя постоянного тока независимого возбуждения. Реальные характеристики
вентильного двигателя (8) достаточно хорошо совпадают с приближенными только в
первом квадранте координатной системы ![]() .
.
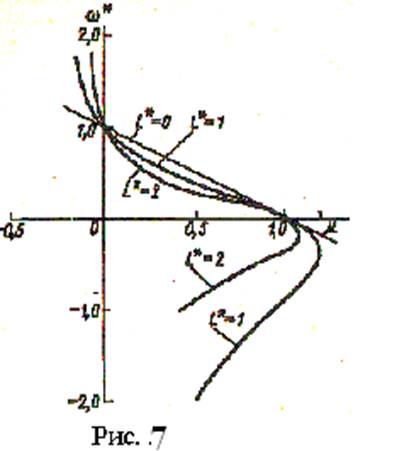
На
рис.7 в относительных единицах приведены характеристики вентильного двигателя,
рассчитанные по уравнению (8). Нелинейность характеристик, наиболее слабая в
первом квадранте, зависит от отношения индуктивности обмоток к их активным
сопротивлениям ![]() .
.
Полученные выражения и характеристики вентильного
двигателя были получены при условии синусоидальности напряжений, приложенных к
обмоткам двигателя, т. е. они справедливы только для первых гармоник напряжения
статора. Реальная ступенчатая форма напряжения, рис. 4, вызывает неравномерное
вращение вектора потока статора и колебания электромагнитного момента.
Действительно, в соответствии с общим выражением для электромагнитного момента
его величина определяется векторным произведением потоков ротора и статора. Эта
зависимость может быть представлена в виде
![]() .
.
При движении ротора в пределах одного
такта коммутации угол ![]() изменяется
от 120о до 60о (рис.3). При постоянных значениях модулей
изменяется
от 120о до 60о (рис.3). При постоянных значениях модулей
![]() и
и ![]() это приводит
к изменению момента от
это приводит
к изменению момента от ![]() при
при
![]() до
до
![]() при углах 60
и 120 градусов. Подводя итоги можно констатировать, что
использование дискретного ДПР не позволяет получить постоянство
электромагнитного момента и, соответственно, скорости ротора в пределах одного
оборота вала двигателя.
при углах 60
и 120 градусов. Подводя итоги можно констатировать, что
использование дискретного ДПР не позволяет получить постоянство
электромагнитного момента и, соответственно, скорости ротора в пределах одного
оборота вала двигателя.
Для улучшения характеристик двигателя следует переходить к непрерывному управлению полем статора, при котором обеспечивается синусоидальность напряжения на обмотках и плавность движения вектора потока статора.
Такое управление иногда называют синусной коммутацией обмоток статора СД. В этом случае в качестве датчика положения ротора используют СКВТ, сельсины или другие датчики углового положения ротора, вырабатывающие синусоидальные сигналы управления. В таких системах коммутатор выполняется по схеме преобразователя частоты (инвертора) с управлением от датчика положения ротора, позволяющей получить на выходе 3-х фазное синусоидальное напряжение с весьма малым содержанием гармоник. При создании непрерывных систем управления СД обычно используются математические модели, представленные в векторной форме.
Использование в качестве постоянных магнитов на основе редкоземельных металлов позволило существенно улучшить электромеханические характеристики и весогабаритные показатели вентильных двигателей по сравнению с другими типами электрических машин.
Сегодня вентильные двигатели применяются там, где требуется: высокая точность позиционирования или стабилизации скорости, широкий диапазон регулирования, высокая перегрузочная способность, быстродействие. При этом обеспечивается получение максимального КПД за счет отсутствия потерь на возбуждение.
Применение постоянных магнитов не только исключает потери на возбуждение, но также приводит к снижению момента инерции ротора из-за отсутствия на нем обмоток возбуждения и упрощению системы охлаждения, т.к. охлаждать приходится только статор двигателя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.