Лекция 25
Механические характеристики и регулировочные свойства системы широтно-импульсный преобразователь — двигатель
Ухудшение энергетических характеристик системы УВ - Д при малых нагрузках, особенно ее коэффициент мощности, и отрицательное влияние высших гармоник на сеть привело к интенсивному использованию систем ШИП - Д.
Широтно-импульсный преобразователь
содержит неуправляемый выпрямитель. Поэтому при питании от сети переменного
тока (рис.1) коэффициент мощности такого привода увеличивается почти до
единицы. Кроме того, повышение частоты коммутации в ШИП до 1-20 кГц, вместо
150-300 Гц в УВ, 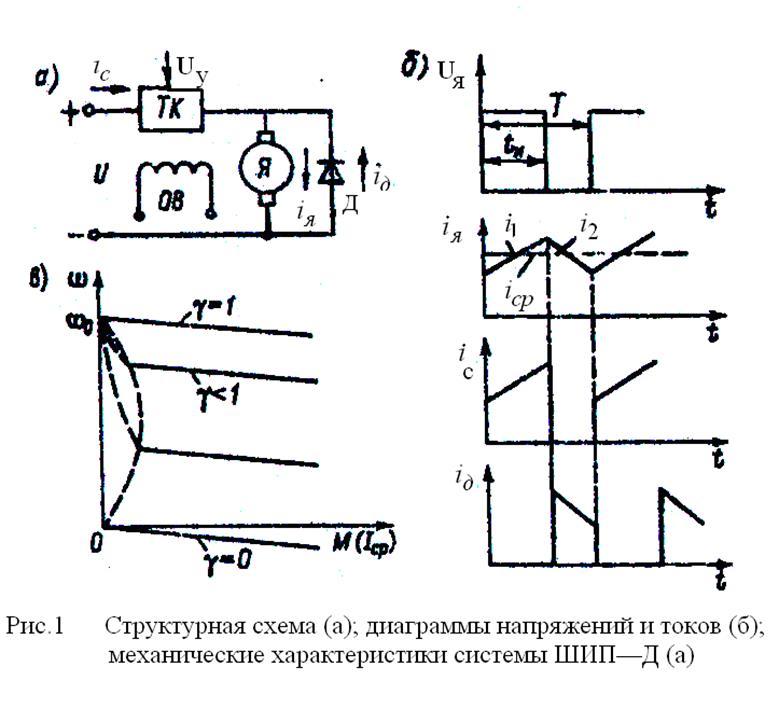 позволяет уменьшить неравномерность
вращения двигателя, расширить диапазон регулирования и повысить жесткость
механических характеристик замкнутых систем электропривода.
позволяет уменьшить неравномерность
вращения двигателя, расширить диапазон регулирования и повысить жесткость
механических характеристик замкнутых систем электропривода.
Принципы работы и теория расчета характеристик системы ШИП-Д значительно проще, чем УВ - Д. Они поясняются рис.1
Благодаря периодическому
замыканию ключа ТК на якорь двигателя подаются импульсы напряжения ![]() и ток в якоре
и ток в якоре ![]() двигателя колеблется. Из
сети потребляется импульсный ток Ic .
двигателя колеблется. Из
сети потребляется импульсный ток Ic .
При закрытом (разомкнутом) ключе в цепи якоря поддерживается ток за счет ЭДС самоиндукции, который протекает через диод Д. Поэтому ток в якоре Iя равен току Iс при открытом ключе и току IД при закрытом ключе.
Относительная продолжительность
импульсов напряжения ![]() равна:
равна:
 ,
(1)
,
(1)
где ![]() —длительность
открытого состояния ключа; Т—период коммутации ключа.
—длительность
открытого состояния ключа; Т—период коммутации ключа.
Среднее значение напряжения на якоре двигателя
 (2)
(2)
где ![]() напряжение в сети без
учета падения напряжения на ключе.
напряжение в сети без
учета падения напряжения на ключе.
Таким образом, если сигнал
управления ключом ТК Uу пропорционален относительной
продолжительности импульсов напряжения па якоре двигателя ![]() , то
, то ![]() . Следовательно, такой
ключ является источником управляемого (регулируемого) напряжения.
. Следовательно, такой
ключ является источником управляемого (регулируемого) напряжения.
Основные принципы построения и классификации систем ШИП—Д. Система ШИП—Д, изображенная на рис. 1, не обеспечивает режим реверса и рекуперативного торможения, поэтому она не применяется в современной практике.
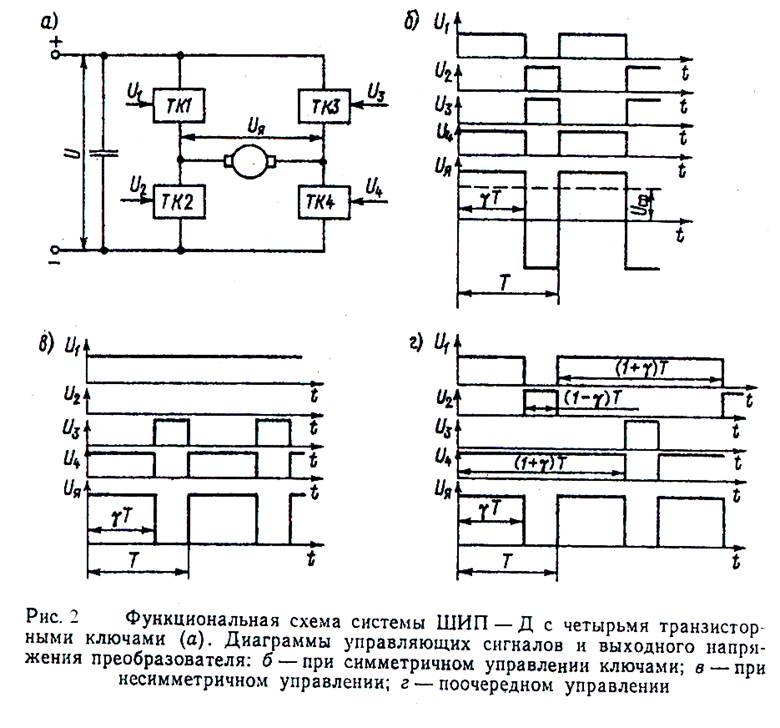
Более универсальной является схема, изображенная на рис.2.а, содержащую четыре ключа ТК1 — ТК4 с независимыми системами управления. При этом можно реализовать симметричное, несимметричное и поочередное управление транзисторными ключами.
Симметричное управление
(рис.2б) является наиболее простым, так как в течение периода Т необходимо реализовать
одновременное управление двумя диагонально расположенными ключами ТК1 и ТК4, а
затем ТК2 и ТКЗ. Двухполярное напряжение на выходе ШИП Uя обеспечивает плавное изменение среднего
напряжения от ![]() без зоны нечувствительности
при
без зоны нечувствительности
при ![]() :
:
![]() (3)
(3)
Недостатком такого управления является повышение пульсаций тока в якоре, что привело созданию других способов управления.
Несимметричное управление
(рис. 2, в) получают при постоянно открытом ключе, например ТК1, и
постоянно закрытом другом ключе ТК2, последовательно подключенных к источнику
питания. Два других ключа переключаются в противофазе. На якоре двигателя
формируются однополярные импульсы напряжения ![]() . Изменение полярности
импульсов напряжения на якоре достигается при постоянно открытом ключе ТКЗ и
постоянно закрытом ключе ТК4. Недостатком несимметричного управления является
наличие зоны нечувствительности при
. Изменение полярности
импульсов напряжения на якоре достигается при постоянно открытом ключе ТКЗ и
постоянно закрытом ключе ТК4. Недостатком несимметричного управления является
наличие зоны нечувствительности при ![]() и
большая токовая нагрузка
верхних ключей в схеме (рис.2, а). Последний недостаток исключается в схеме с поочередным управлением ключами (рис.2, г). Здесь в состоянии
переключения в течение двух периодов находятся все четыре транзисторных ключа.
Причем два диагонально расположенных ключа, например ТК1 и ТК4, имеют длительность
и
большая токовая нагрузка
верхних ключей в схеме (рис.2, а). Последний недостаток исключается в схеме с поочередным управлением ключами (рис.2, г). Здесь в состоянии
переключения в течение двух периодов находятся все четыре транзисторных ключа.
Причем два диагонально расположенных ключа, например ТК1 и ТК4, имеют длительность
 |
Механические характеристики системы ШИП — Д.
Уравнение механической характеристики для режимов непрерывного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.