











Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра «Систем автоматического управления»
Пояснительная записка ПЗ08.24.04.1986
к курсовому проекту по механике
Выполнил:
группа: 3083/2
Преподаватель:
2009 г.
1. Выбор двигателя:
Используя формулу  ,высчитаем величину потребляемой мощности двигателя: Wпот=10
,высчитаем величину потребляемой мощности двигателя: Wпот=10![]() 996Вт,
где
996Вт,
где ![]()
С помощью каталога выберем двигатель:
|
Типоразмер двигателя |
Мощность |
Скорость |
Номинальный ток , Iн |
Номинальное напряжение, u н |
Сопротив- |
Индуктивность |
Момент инерции ротора, Jр |
|
Nдн |
nдн |
ление, R |
L |
||||
|
Вт |
об/мин |
А |
В |
Ом |
Гн |
кгм2 |
|
|
2ПН112L |
2 200 |
1 500 |
11 |
220 |
0,968 |
0,014 |
0,018 |
Двигатель 2ПН112L удовлетворяет всем условиям:
1) Wдн=2200Вт≥ Wпот=996Вт
2) неравенство:
![]() . Верно (440 кгм
>183,3кгм)
. Верно (440 кгм
>183,3кгм)
Использовались
формулы  и
и ![]() ,
где g - коэффициент перегрузки задан равным
2.
,
где g - коэффициент перегрузки задан равным
2.
Параметры этого двигателя:
а)
число оборотов в минуту на холостом ходу ![]()
б)
электромагнитную постоянную времени ![]()
в)
крутизну статической характеристики двигателя ![]() .
.
Передаточное число редуктора: ![]()
2. Динамическое исследование машинного агрегата:
«Задачей
динамического исследования машины является определение закона движения входного
звена исполнительного механизма ![]() с учетом
динамических свойств приводного двигателя, движущего момента
с учетом
динамических свойств приводного двигателя, движущего момента ![]() и динамической нагрузки в приводе
и динамической нагрузки в приводе ![]() , а также оценка неравномерности
вращения входного звена и проверка перекладки зазоров в приводе, улучшение
динамических показателей качества машины»
, а также оценка неравномерности
вращения входного звена и проверка перекладки зазоров в приводе, улучшение
динамических показателей качества машины»
Машинный агрегат состоит из двигателя, передаточного и исполнительного механизмов. Динамический расчет машинного агрегата связано с определением и исследованием стационарного решения системы дифференциальных уравнений
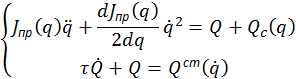
Первое
уравнение системы представляет собой уравнение механической системы агрегата,
рассматриваемой как механизм с жесткими звеньями, обладающими одной степенью
свободы (подвижности). В этом уравнении ![]() -
обобщенная координата;
-
обобщенная координата; ![]() - приведенный момент
инерции механической системы;
- приведенный момент
инерции механической системы; ![]() - приведенный
момент сил сопротивления.
- приведенный
момент сил сопротивления.
Второе
уравнение системы является приведенной динамической характеристикой двигателя.
Здесь ![]() - постоянная времени двигателя;
- постоянная времени двигателя; ![]() - приведенная статическая
характеристика двигателя, разрешенная относительно момента.
- приведенная статическая
характеристика двигателя, разрешенная относительно момента.
Первым этапом динамического исследования машинного агрегата является определение коэффициентов, входящих в систему дифференциальных уравнений:
а) Приведённый момент инерции определяется по формуле
![]() , где
, где ![]() - переменная часть приведённого момента инерции,
- переменная часть приведённого момента инерции, ![]() -момент инерции двигателя, которые вычисляется по формулам:
-момент инерции двигателя, которые вычисляется по формулам:

![]()
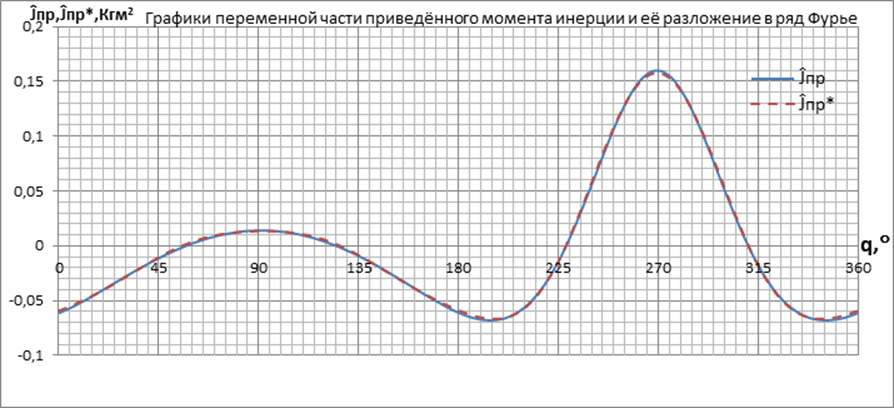
Полученную функцию ![]() с целью
упрощения динамических расчетов разложить в ряд Фурье с точностью до пяти
гармоник:
с целью
упрощения динамических расчетов разложить в ряд Фурье с точностью до пяти
гармоник:![]() , где
, где ![]() без маховика
без маховика
![]()
Коэффициенты ряда Фурье для приведённого момента инерции:
|
J1c= |
-0,001 |
J1s= |
-0,0339 |
|
J2c= |
-0,0727 |
J2s= |
0,0003 |
|
J3c= |
0,001 |
J3s= |
0,0341 |
|
J4c= |
0,0132 |
J4s= |
-0,0006 |
|
J5c= |
-0,0002 |
J5s= |
-0,005 |
Построим графики функции переменной части приведённого момента инерции(Ĵпр) и её разложения в ряд Фурье(Ĵпр*) для 12и точек:
|
q |
Ĵпр |
Ĵпр* |
|
0 |
-0,0612 |
-0,0599 |
|
30 |
-0,0278 |
-0,029 |
|
60 |
0,0024 |
0,0035 |
|
90 |
0,0143 |
0,0132 |
|
120 |
0,004 |
0,0052 |
|
150 |
-0,0258 |
-0,027 |
|
180 |
-0,0607 |
-0,0594 |
|
210 |
-0,0557 |
-0,0573 |
|
240 |
0,0557 |
0,0576 |
|
270 |
0,1604 |
0,1582 |
|
300 |
0,0509 |
0,0529 |
|
330 |
-0,0565 |
-0,0581 |
|
360 |
-0,0612 |
-0,0599 |
Производная
от приведенного момента инерции по обобщенной координате вычисляется по
формуле:  .
.
Её график для 12и точек:

б) Приведенный момент сил сопротивления определяется по формуле:
![]() , где
, где ![]()
Функция ![]() раскладывается
в ряд Фурье с точностью до пяти гармоник:
раскладывается
в ряд Фурье с точностью до пяти гармоник:
![]()
![]()
Коэффициенты ряда Фурье для приведённого момента сил сопротивления:
|
Q1c= |
-1,7745 |
Q1s= |
-136,4172 |
|
Q2c= |
-33,8325 |
Q2s= |
1,4001 |
|
Q3c= |
0,6003 |
Q3s= |
9,477 |
|
Q4c= |
2,6261 |
Q4s= |
-0,0184 |
|
Q5c= |
0,0527 |
Q5s= |
-0,7169 |
Построим графики функции переменной части приведённого момента сил сопротивления(Õс) и её разложения в ряд Фурье(Õс*) для 12и точек:
|
q |
Õc |
Õc* |
|
0 |
-32,5198 |
-32,3279 |
|
30 |
-77,534 |
-77,7051 |
|
60 |
-102,308 |
-102,1493 |
|
90 |
-110 |
-110,1525 |
|
120 |
-101,836 |
-101,6841 |
|
150 |
-76,7772 |
-76,9336 |
|
180 |
-30,2541 |
-30,0849 |
|
210 |
43,8337 |
43,6397 |
|
240 |
135,5808 |
135,8128 |
|
270 |
183,3333 |
183,0698 |
|
300 |
130,1772 |
130,4335 |
|
330 |
38,3046 |
38,0818 |
|
360 |
-32,5198 |
-32,3279 |

в) Определим
приведенную статическую характеристику двигателя: ![]() где
где
![]() - угловая скорость холостого хода
ротора двигателя.
- угловая скорость холостого хода
ротора двигателя.
3. Решение уравнений движения машины:
Система
дифференциальных уравнений движения (см.п.2) содержит две неизвестные функции
времени ![]() и
и ![]() .
Для отыскания стационарного решения этих уравнений воспользуемся методом
последовательных приближений. Для этого уравнения запишем в такой форме,
чтобы в правых частях стояли только те слагаемые, которые явно содержат
.
Для отыскания стационарного решения этих уравнений воспользуемся методом
последовательных приближений. Для этого уравнения запишем в такой форме,
чтобы в правых частях стояли только те слагаемые, которые явно содержат ![]() , поскольку они вызывают отклонения
закона движения от программного (равномерного) вращения:
, поскольку они вызывают отклонения
закона движения от программного (равномерного) вращения:

где волнистой линией обозначены переменные части соответствующих функций.
В нулевом
приближении, т.е. при ![]() получаем систему
уравнений
получаем систему
уравнений
![]()
Пусть ![]()
![]()
Известно, что ![]() , а
, а ![]()
Тогда решение этой системы:

![]()
При установленном тормозе, с моментом Qt=180Нм:
![]()
![]()
При ![]() получим систему уравнений
получим систему уравнений![]()
Выражение, стоящее в правой части
первого уравнения – возмущающий момент:![]() характеризует
внутреннюю виброактивность исполнительного механизма.
характеризует
внутреннюю виброактивность исполнительного механизма.
Решение системы
уравнений в первом приближении (![]() разыскиваем в
виде
разыскиваем в
виде ![]()
![]()
Здесь ![]() - отклонение закона движения
входного звена от программного (равномерного) движения, называемое динамической
ошибкой по углу;
- отклонение закона движения
входного звена от программного (равномерного) движения, называемое динамической
ошибкой по углу; ![]() - отклонение движущего
момента от среднего значения. Подставив эти решения в систему уравнений,
получим
- отклонение движущего
момента от среднего значения. Подставив эти решения в систему уравнений,
получим![]()
Разложим возмущающий момент на программном движении ![]() в ряд Фурье с точностью до пяти
гармоник:
в ряд Фурье с точностью до пяти
гармоник: ![]() где
где ![]()
![]() ;
;![]()
L1=136,46;L2=34,3;L3=10,51;L4=3,6;L5=1,36;
Построим график возмущающего момента для 12 точек:
|
w0t |
L* без тормоза |
L* с тормозом |
|
0 |
-34,7422 |
-34,5548 |
|
30 |
-81,5967 |
-81,2946 |
|
60 |
-104,4439 |
-104,2658 |
|
90 |
-110,2599 |
-110,2516 |
|
120 |
-99,5017 |
-99,6711 |
|
150 |
-72,9946 |
-73,3004 |
|
180 |
-27,4575 |
-27,6615 |
|
210 |
38,4535 |
38,8561 |
|
240 |
119,1166 |
120,4127 |
|
270 |
183,5101 |
183,4759 |
|
300 |
147,0289 |
145,7405 |
|
330 |
42,8877 |
42,5146 |
|
360 |
-34,7422 |
-34,5548 |
Заметим, что наличие тормоза на форму графика почти не повлияло.

Видим, что графики возмущающего момента и приведённого момента
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.