





Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
—————————
Кафедра систем автоматического управления
ОТЧЕТ
по лабораторной работе №8
для управление температурой
|
Студент: |
Ву Ван |
|
гр. /2 |
|
|
Преподаватель: |
|
Санкт-Петербург — 2011
Задание
Создать программу по управлению температурой, используя ПИД-регулятор в TwidoSuite.
Описание
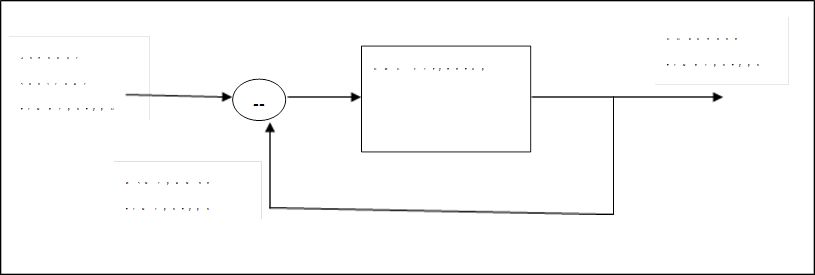
ПИД – регулятор – это звено управления известно нам его уравнением:
![]()
Где: ![]() –
коэффициенты звена
–
коэффициенты звена
x- входной сигнал звена
y– выходной сигнал звена
 |
Пусть нам надо построить систему управления температурой какого-то объекта с использованием ПИД-регулятора при задании желаемого значения темературы. За принчину отсутствования модули расширения и терморезистора, то делаем более простую задачу: Выходное значение температуры ПИД-регулятора сохранится в ячейке памяти контроллера, и такое же значение является измеримым значением температуры обратной связи управления.
Программа
ПИД-регулятор должен быть включен в программу обучения. Эта инструкция может быть постоянным или состояние входных или внутренних бит. В этом примере PID включен по инструкции% M0:
В языке Ladder:
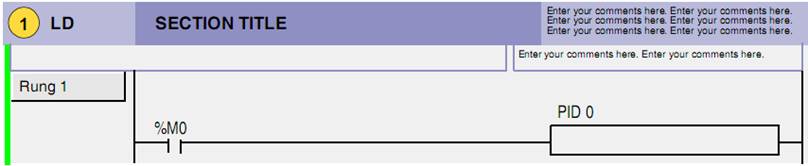
В языке Instruction List:
0 LD %M0
1 [ PID 0 ]
Конфигурациясканированияпериода:
При использовании ПИД-регуляторов, вам настоятельно рекомендуется настроить режим сканирования цикла ПЛК к периодическим.
- Использование Program → Configure → Configure the Behavior для настройки параметров контроллера Режим сканирования.
-
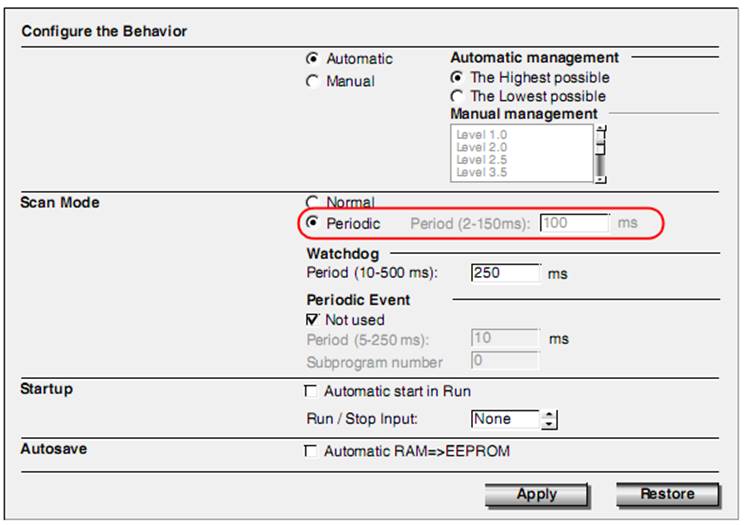
Примечание: время цикла должны быть приспособлены для размера программы и желаемой производительности. (Время 50 мс является хорошим компромиссом)
НастройкаПИД
Для этого примера мы выбрали для реализации большинства ПИД-регулятор функции для Twido. Некоторые выборы не являются существенными и могут быть упрощены.
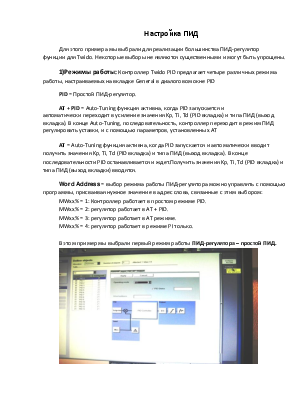
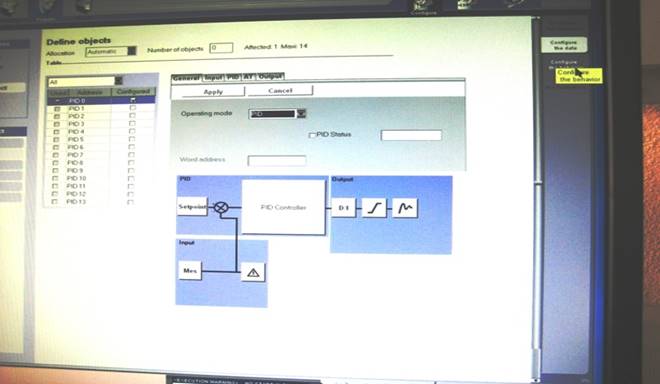
1)Режимы работы: Контроллер Twido PID предлагает четыре различных режима работы, настраиваемых на вкладке General в диалоговом окне PID
PID = Простой ПИД-регулятор.
AT + PID = Auto-Tuning функция активна, когда PID запускается и автоматически переходит в усиление значения Kp, Ti, Td (PID вкладка) и типа ПИД (выход вкладка). В конце Auto-Tuning, последовательность, контроллер переходит в режим ПИД регулировать уставки, и с помощью параметров, установленных AT
AT = Auto-Tuning функция активна, когда PID запускается и автоматически вводит получить значения Kp, Ti, Td (PID вкладка) и типа ПИД (выход вкладка). В конце последовательности PID останавливается и ждет.Получить значения Kp, Ti, Td (PID вкладка) и типа ПИД (выход вкладки) вводятся.
WordAddress = выбор режима работы ПИД-регулятора можно управлять с помощью программы, присваивая нужное значение в адрес слова, связанные с этим выбором:
MWxx% = 1: Контроллер работает в простом режиме PID.
MWxx% = 2: регулятор работает в AT + PID.
MWxx% = 3: регулятор работает в AT режиме.
MWxx% = 4: регулятор работает в режиме PI только.
В этом пример мы выбрали первый режим работы ПИД-регулятора – простой ПИД.
2) Параметры ввода ПИД-регулятора:
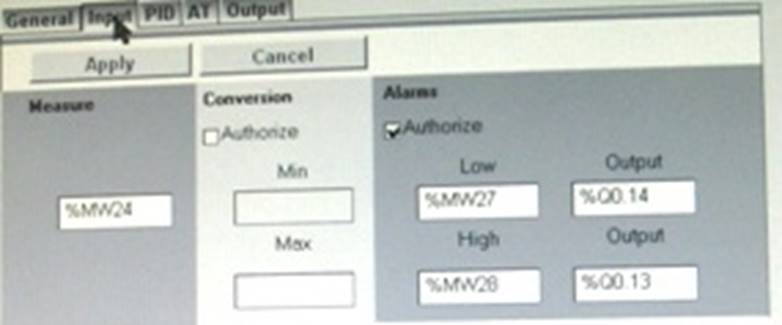
В этом примере вводим измеримое значение температуры в ячейку памяти %MW24. Эта ячейка тоже сохранит выходное значение температуры ПИД-регулятора. Можно делать тревоги для контроля измеримого сигнала. Низкий предел вводится в ячейку %MW27 – соответственный светдиод %Q0.14, который загорается когда измеримое значение меншее низкого предела. Верхний предел вводится в ячейку %MW28 – соответственный светдиод Q%0.13, который загорается когда измеримое значение превышает верхнего предела.
3) ПИД- параметры
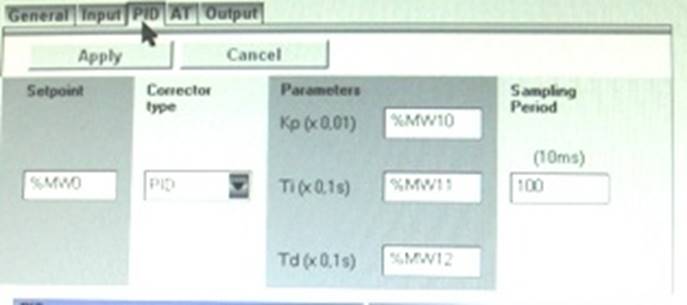
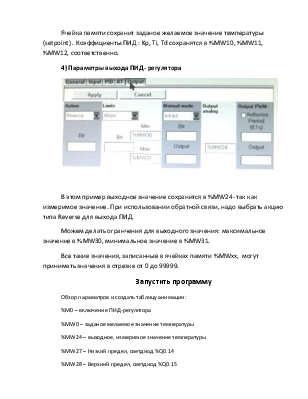
Ячейка памяти сохранит заданое желаемое значение температуры (setpoint) . Коэффициенты ПИД : Kp, Ti, Td сохранятся в %MW10, %MW11, %MW12, соответственно.
4) Параметры выхода ПИД- регулятора
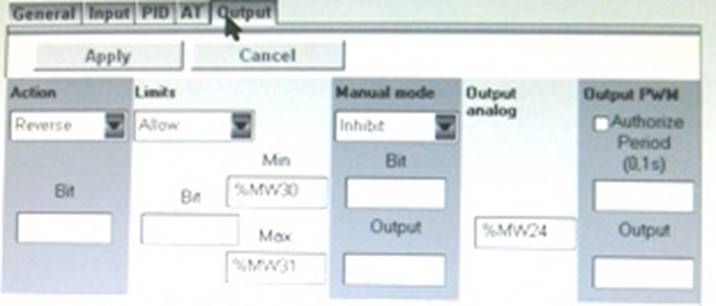
В этом пример выходное значение сохранится в %MW24- так как измеримое значение. При использовании обратной связи, надо выбрать акцию типа Reverse для выхода ПИД.
Можем делать огранчения для выходного значения: максимальное значение в %MW30, минимальное значение в %MW31.
Все такие значения, записанные в ячейках памяти %MWxx, могут принимать значения в отрезке от 0 до 99999.
Запустить программу
Обзор параматров и создать таблицу анимации:
%M0 – включение ПИД-регулятора
%MW0 – заданое желаемое значение температуры
%MW24 – выходное, измеримое значение температуры
%MW27 – Низкий предел, светдиод %Q0.14
%MW28 – Верхний предел, светдиод %Q0.15
%MW10 – Kp
%MW11 – Ti
%MW12 – Td
%MW30 – Огранченное минимальное значение
%MW31 - Огранченное максимальное значение
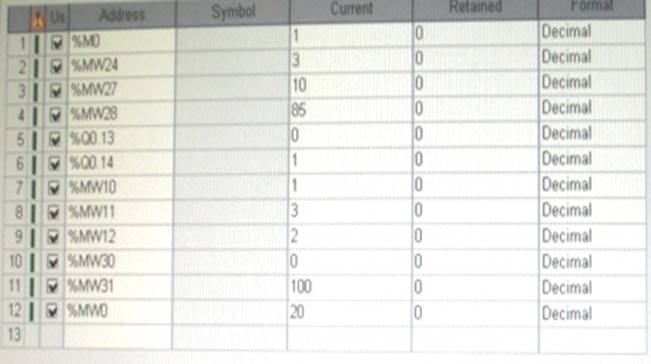
В примере измеримое значение температуры является выходным значением, поэтомы выбрали коэффициент усиления ПИД- регулятора Kp=1. Другие коэффициенты : Ti=2, Td=3.
Низкий предел: ![]() ; верхний предел
; верхний предел ![]() ;
;
Огранченное
максимальное значение : ![]() ; Огранченное
минимальное значение
; Огранченное
минимальное значение ![]() .
.
При запуске программы, выбрем вклад Annimation, мы ведим все параметры ПИД- регулятора на схеме.
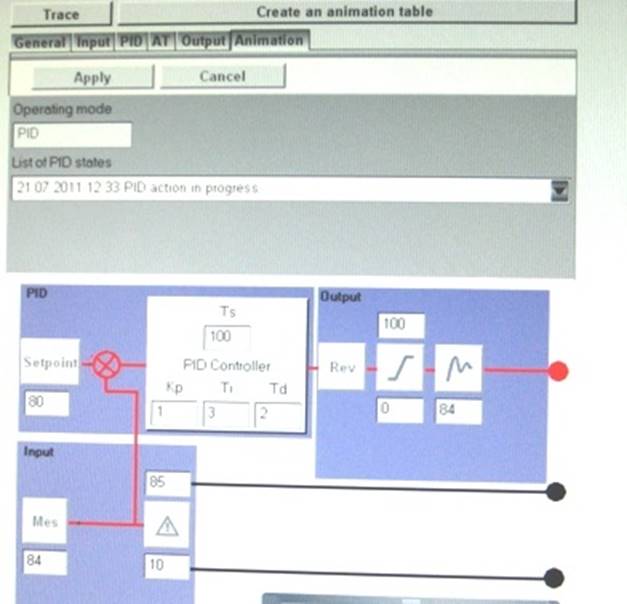
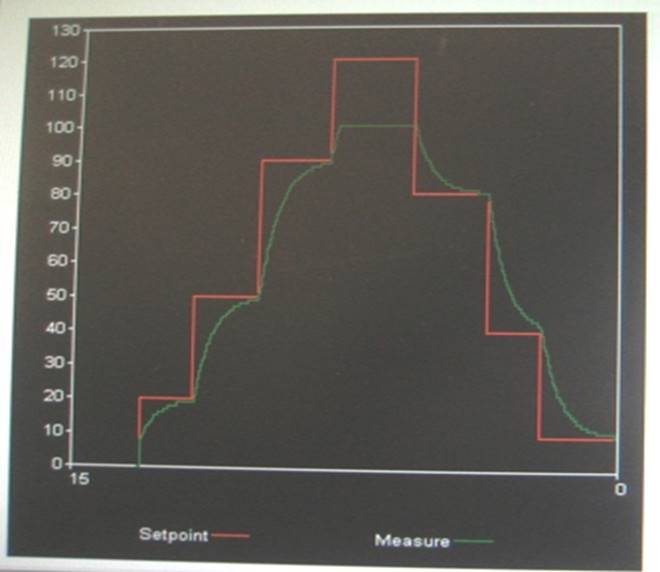
График (Trace) результатов при разных заданных желаемых значений температуры за 15 минут
Вывод:
В ходе работы мы познакомились с ПИД регулятором и ее
функциями. Видно из результатов, при выборе коэффициентов ПИД-регулятора : Kp=1, Ti=3, Td=2 –
система управления устойчива- через несколько времени выходная температура
достигает заданного значения. При огранчения, выходная температура может
достигает только ![]() (максимальное огранченное значение) когда заданное значение
больше этого значения.
(максимальное огранченное значение) когда заданное значение
больше этого значения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.