ЕСЛИ {напряжение анод-катод (Uак) тиристора больше нуля (ток тиристора не отрицателен) и "поступил" импульс управления} ТО тиристор отпирается (Rv - "мало", Lv - "мало");
ЕСЛИ {ток тиристора стал отрицательным} ТО тиристор запирается
(Rv - "велико", Lv - "велико").
4. НАГРУЗКА. В зависимости от характера нагрузки (активная, индуктивная, активно-индуктивная, емкостная,...) может быть представлена в эквивалентной схеме соответствующим набором индуктивности Lн, активного сопротивления Rн и емкости Cн.
Особое место занимает случай, когда в качестве нагрузки используется электродвигатель постоянного тока.
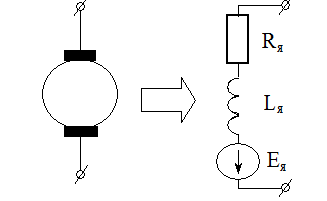
Рис.5. Схема замещения двигателя постоянного тока.
Тогда, как показано на рис.5, электродвигатель замещается последовательно соединенными активным сопротивлением Rя, индуктивностью Lя и ЕДС якоря Ея. В двигательном режиме направление ЕДС противоположно направлению тока, протекающего через электродвигатель.
5. ДРОССЕЛЬ. В некоторых схемах управляемых выпрямителей встречается и такой элемент. Его условное обозначение приведено на рис.6.
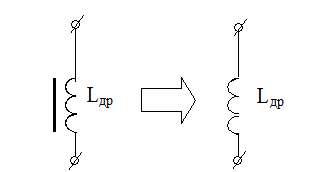
Рис.6. Схема замещения дросселя.
В силу того, что активное сопротивление дросселя существенно меньше сопротивления других элементов, его величиной обычно пренебрегают, и дроссель в схемах замещения представляется одной индуктивностью Lдр.
С учетом описанных выше эквивалентных замещений типовых элементов осуществлен переход от принципиальной схемы выпрямителя, приведенной на рис.1, к эквивалентной схеме, изображенной на рис.7.
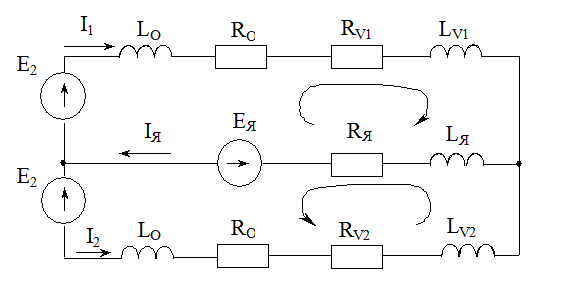
Рис.7. Схема замещения двухполупериодного управляемого выпрямителя, нагруженного на двигатель постоянного тока.
Как следует из эквивалентной схемы, в качестве нагрузки выпрямителя использован электродвигатель постоянного тока.
На ВТОРОМ ЭТАПЕ моделирования по полученной эквивалентной схеме строится математическая модель управляемого выпрямителя. Решение этой задачи осуществляется с использованием законов Кирхгофа.
Предварительно в эквивалентной схеме обозначаются токи, протекающие в каждой ветви. Направления токов можно выбирать произвольным образом, но желательно придерживаться следующего правила:
ПРАВИЛО 1. Направление тока в ветви, включающей тиристор (диод), соответствует реальному направлению протекания тока через открытый вентиль.
На основании I закона Кирхгофа (алгебраическая сумма токов в узле равна нулю) для схемы на рис.7 имеет место уравнение:
I1+ I2- IЯ = 0 . (1)
Несмотря на то, что в схеме на рис.7 два узла, можно получить только одно линейно независимое уравнение, потому что второе получаемое уравнение будет таким же, но знаки в нем сменятся на противоположные, то есть оба уравнения будут линейно зависимыми.
Отмеченный факт наблюдается в любой схеме: число линейно независимых уравнений меньше количества узлов на единицу.
Для применения II закона Кирхгофа в схеме рис.7 образуют контуры. Как показано на рисунке, первый контур включает электродвигатель, верхнюю половину обмотки трансформатора и тиристор VD1. Второй контур включает в себя электродвигатель, тиристор VD2, нижнюю половину обмотки трансформатора. Можно построить еще один контур, проходящий через обмотки трансформатора и оба тиристора, но очевидно, что он является линейной комбинацией двух предыдущих контуров, а уравнения, полученные в результате применения II закона Кирхгофа для образованных трех контуров будут линейно зависимыми. Следовательно, на этапе образования контуров необходимо особое внимание обращать на линейную независимость контуров (и соответствующих им уравнений). Для этого имеет смысл руководствоваться правилом:
ПРАВИЛО 2. При образовании контуров обхода необходимо использовать свойство "преемственности": каждый новый контур (кроме первого) включает в себя ветвь, принадлежащую любому из "предыдущих" контуров, и ветвь, не входившую еще ни в один контур.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.