










Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
Расчетное задание №1
Дисциплина: Оптимальные системы управления
Тема: Расчет многомерной системы управления
Выполнил студент гр. 5081/1
Проверил:
Санкт-Петербург
2009
1. Постановка задания
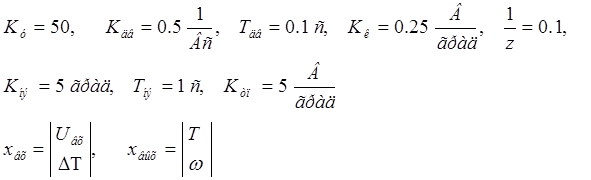
По заданному объекту составить матрицу передаточных функций и уравнения состояния.
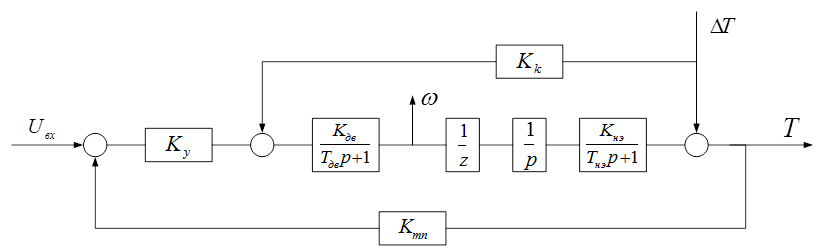
Рис. 1.1. Заданный объект.
2. Составление матрицы передаточных функций
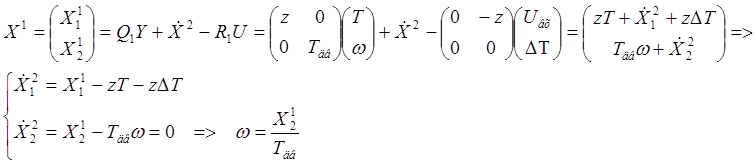
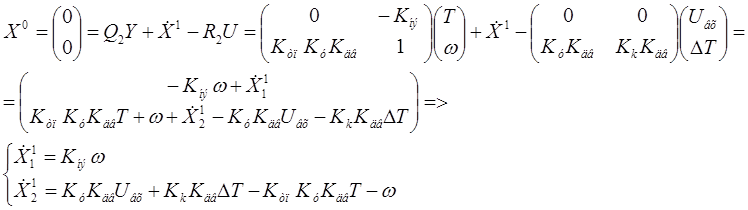
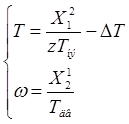
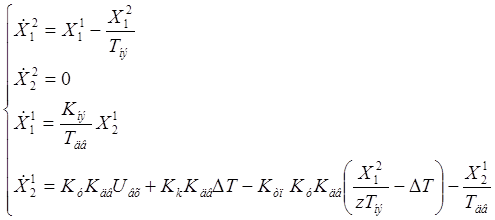
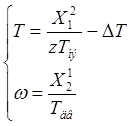
По заданному объекту, представленному на рис. 1.1, составим систему дифференциальных уравнений:
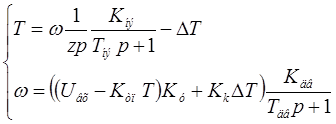

Объект описывается следующим образом:
![]()
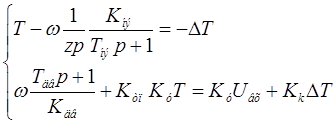
Из полученной системы дифференциальных уравнений составим матрицы Q и R:
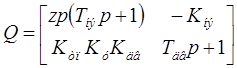
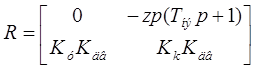
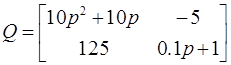
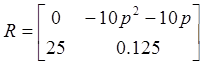
Подставим исходные данные в матрицы:
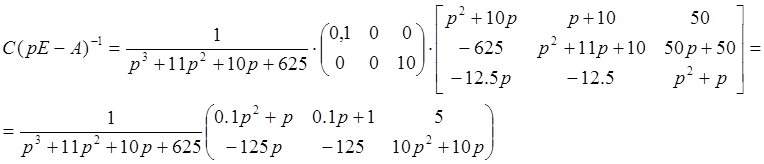
Найдем матрицу передаточных функций:
![]()
Поиск обратной матрицы:
![]() - обратная матрица
- обратная матрица
 - определитель Q
- определитель Q
![]() -
союзная матрица
-
союзная матрица

Передаточная матрица:

3. Описание объекта с помощью уравнений состояния
Заданный объект описывается следующей системой дифференциальных уравнений:

Cоставим матрицы коэффициентов для переменных входа и выхода при степенях производной 0, 1 и 2:
Коэффициенты при 2-ой производной:
![]()
Коэффициенты при 1-ой производной:

Коэффициенты при 0-ой производной:

Вектора переменных состояния:

Получили систему уравнений состояния:
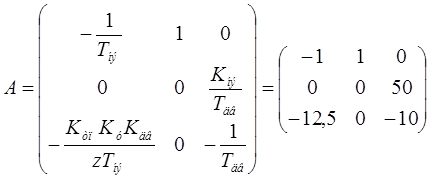
Матрица входа по состоянию:
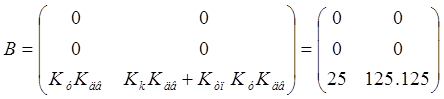
Матрица входа по управлению:
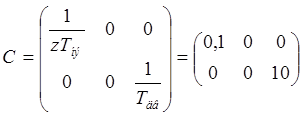
Матрица выхода по состоянию:
Матрица компенсации:
![]()
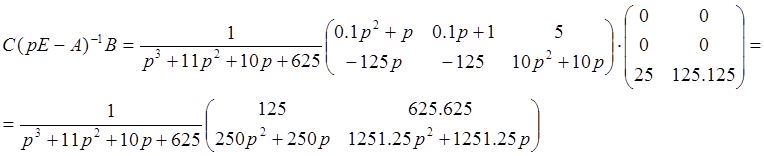
Для проверки найдем матрицу передаточных функций:
![]()

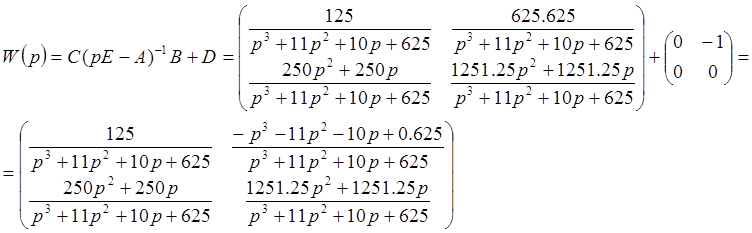
Передаточная матрица совпадает с матрицей, рассчитанной в предыдущем пункте.
4. Проверка правильности расчетов
Для проверки правильности расчетов составим модель исследуемой системы в Simulink и получим переходные характеристики по возможным комбинациям входных и выходных величин.
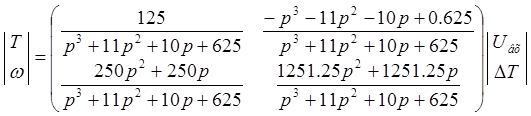
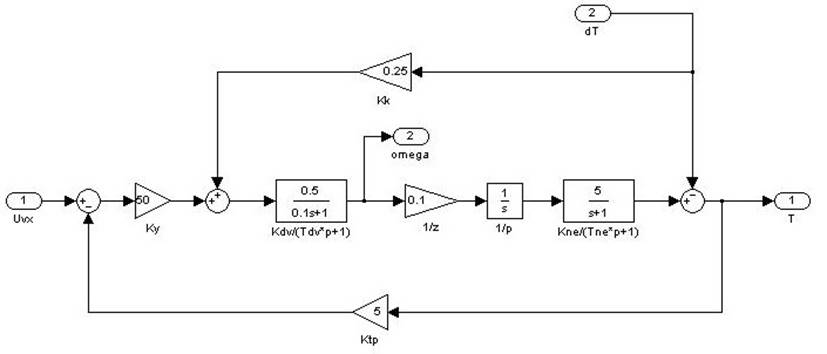
Рис. 4.1.1. Схема объекта (subsystem) в Simulink.
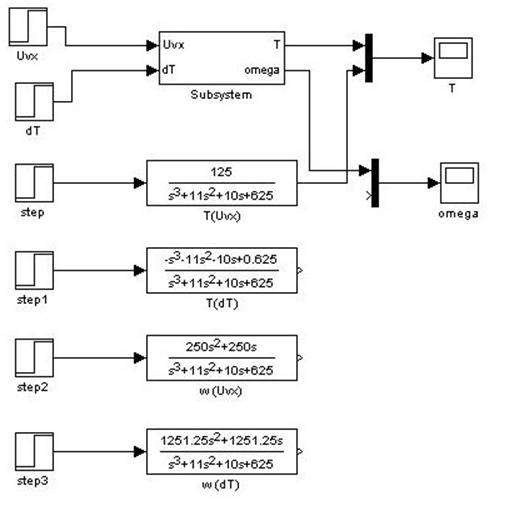
Рис.
4.1.2. Модель для исследования переходной характеристики ![]() относительно
относительно ![]() .
.
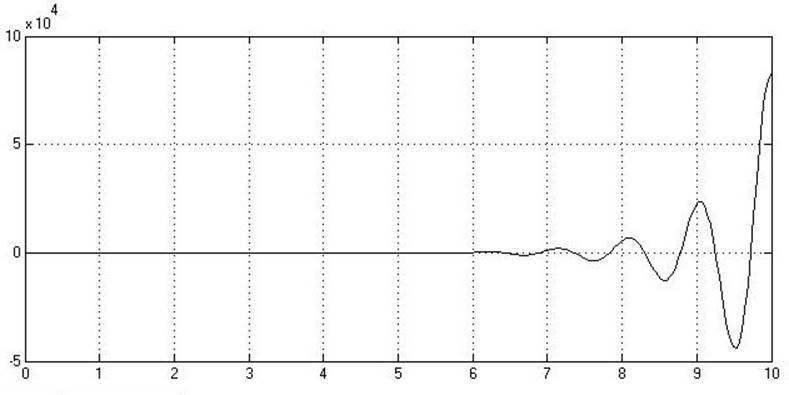
Рис.
4.1.3. Переходная характеристика ![]() относительно
относительно ![]() .
.
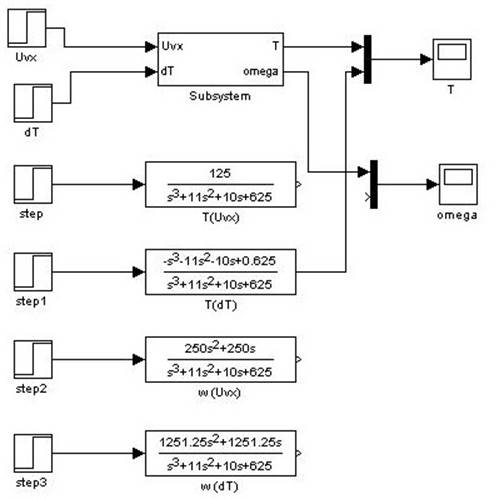
Рис.
4.1.4. Модель для исследования переходной характеристики ![]() относительно
относительно ![]() .
.
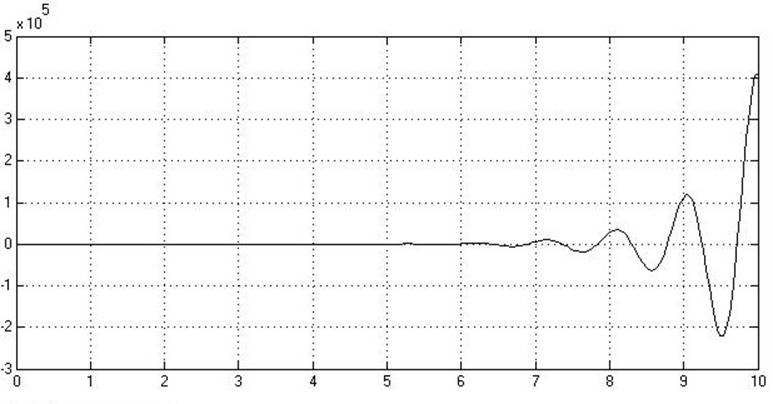
Рис.
4.1.5. Переходная характеристика ![]() относительно
относительно ![]() .
.
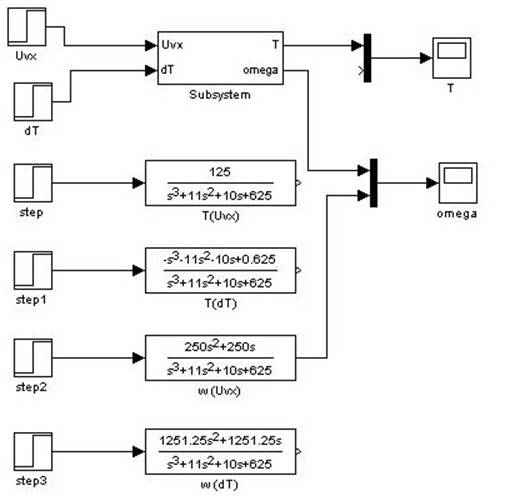
Рис.
4.1.6. Модель для исследования переходной характеристики ![]() относительно
относительно ![]() .
.
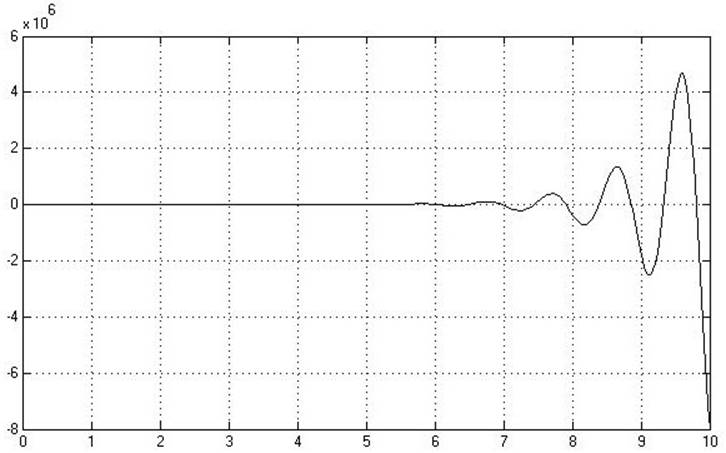
Рис.
4.1.7. Переходная характеристика ![]() относительно
относительно ![]() .
.
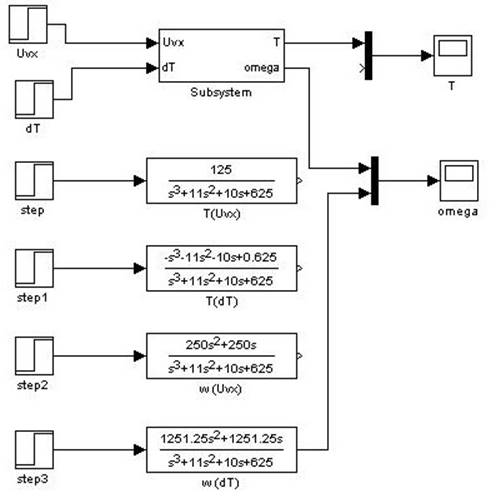
Рис.
4.1.8. Модель для исследования переходной характеристики ![]() относительно
относительно ![]() .
.
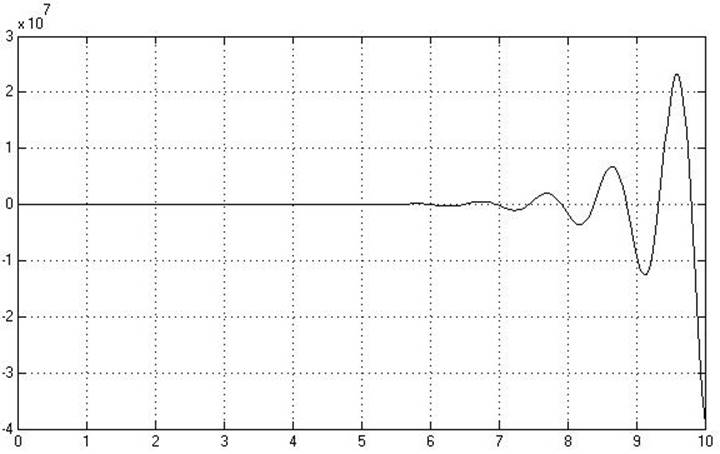
Рис.
4.1.9. Переходная характеристика ![]() относительно
относительно
![]() .
.
Переходные процессы элементов матрицы передаточной функции совпадают с переходными процессами модели системы, что говорит о правильности вычисления W(p).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.