Так как прогнозируемые и реальные (измеряемые) их значения неизбежно отличаются, в структуру фильтра Калмана включена цепь коррекции прогнозируемого значения координат. Для этой коррекции и используется рассогласование (невязка) между реальными (измеряемыми) и прогнозируемыми координатами состояния.
Чтобы оценить эффективность применения наблюдателей, существенно усложняющих структуру управления по сравнению с системой без наблюдателя, в данной работе используется метод экспериментальной оценки сравниваемых систем. При этом следует учитывать, что в системе с наблюдателем, помимо задачи восстановления неизмеряемых координат решается также задача фильтрации помех. В ряде случаев эта задача может быть даже определяющей.
Уравнение объекта:
Уравнение наблюдателя:

3. Исходные данные
a0=1
a1=0.5
a2=1
T0=0.2 c
x(0)=x0=2 В
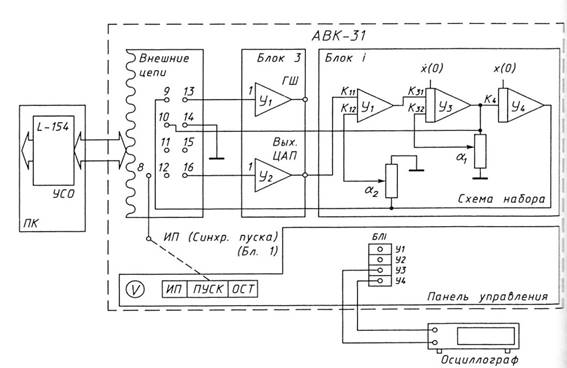
Рис.1. Схема набора
4. Экспериментальное исследование
4.1. Исследование системы с наблюдателем Люенбергера
Перед началом исследования системы были рассчитаны параметры дискретного объекта:
![]()
![]()
![]()
![]()
Также были рассчитаны математическое ожидание и дисперсия шума:
M=0.125
D=0.399
Первый этап. Исследование системы ЛК-управления с полностью измеряемыми координатами состояния объекта.

Рис.2. Переходный процесс объекта и наблюдателя

Рис.3. Переходный процесс замкнутой системы
Как видно из графиков, время переходного процесса в замкнутой системе tпп=6 c, колебательность µ=1, перерегулирование g=30%.
Max погрешность восстановления выходной координаты e=max|x-xвосст|=0.0506 В.
Max погрешность восстановления производной e’=max|x’-xвосст’|=0.2193 В.
Max относительная погрешность выходной координаты εmax=(e/xmax)*100%=5.67%
Max относительная погрешность производной εmax’=(e’/xmax’)*100%=15.55%
Значение критерия J=32.7913
Второй этап. Исследование системы ЛК-управления с не полностью измеряемыми координатами состояния объекта.
Оценка чистого запаздывания.
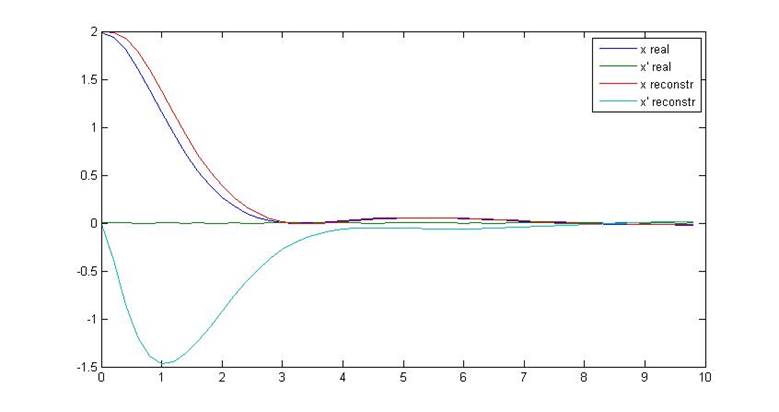
Рис.4. Переходный процесс объекта и наблюдателя
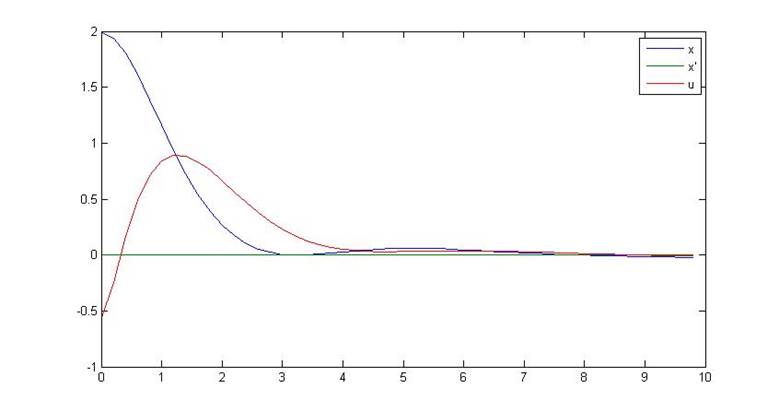
Рис.5. Переходный процесс замкнутой системы
Параметры переходного процесса в замкнутой системе:
tпп=8 c
µ=1
g=5.5%
J=44.0669
Оценка влияния инерционного запаздывания.
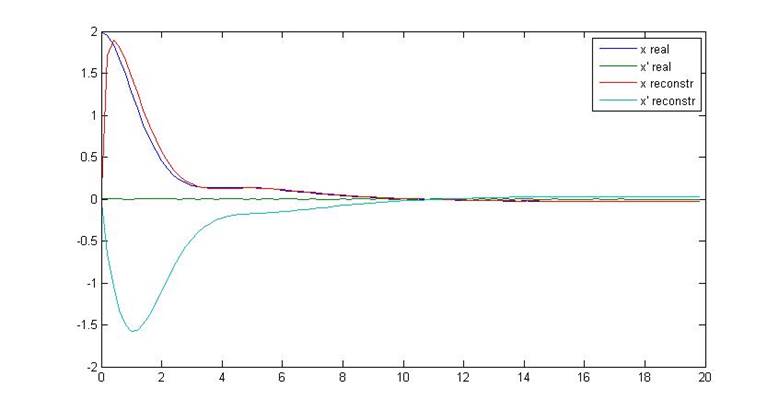
Рис.6. Переходные процессы объекта и наблюдателя
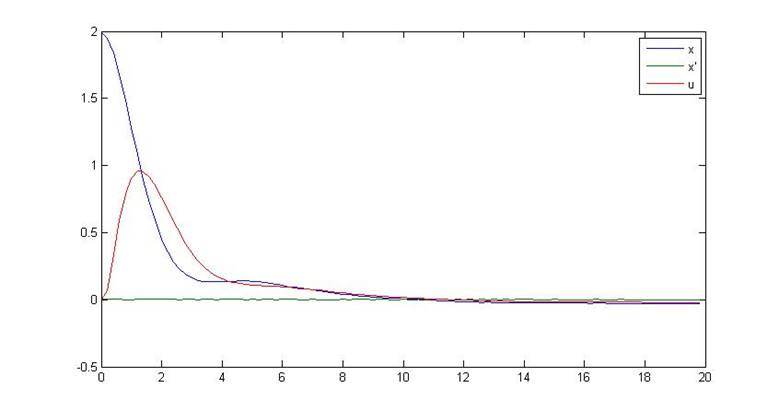
Рис.7. Переходный процесс замкнутой системы
Параметры переходного процесса в замкнутой системе:
tпп=10 c
µ=1
g=14%
J= 48.2226
Третий этап. Исследование квазиоптимальной системы ЛК-управления.
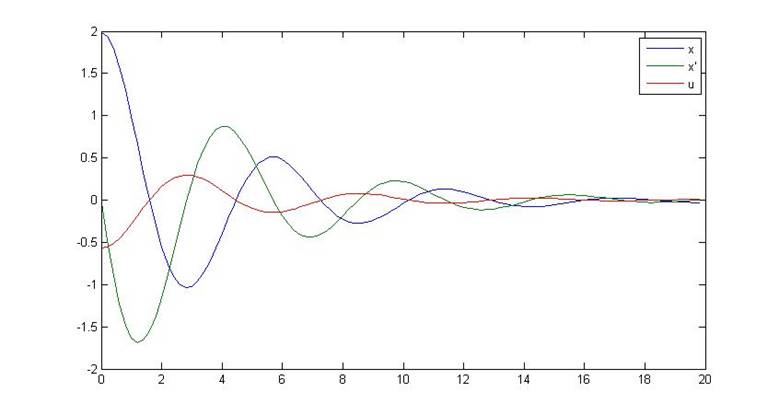
Рис.8. Переходный процесс в квазиоптимальной системе с полностью измеряемыми координатами, K2=0
Параметры переходного процесса:
tпп=18 c
µ=6
g=100%
J= 56.1545
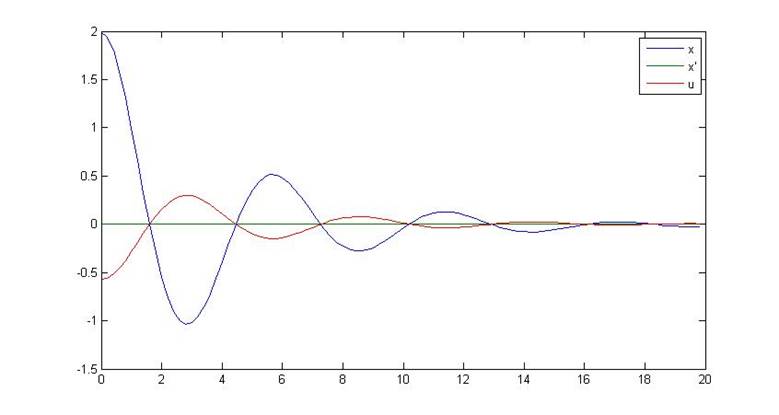
Рис.9. Переходный процесс в квазиоптимальной системе с не полностью измеряемыми координатами
Параметры переходного процесса:
tпп=20 c
µ=7
g=104%
J= 29.1179
Четвертый этап. Исследование системы ЛК-управления при воздействии шумов.
Для данного исследования была выбрана система с полностью измеряемыми координатами, K2=0.
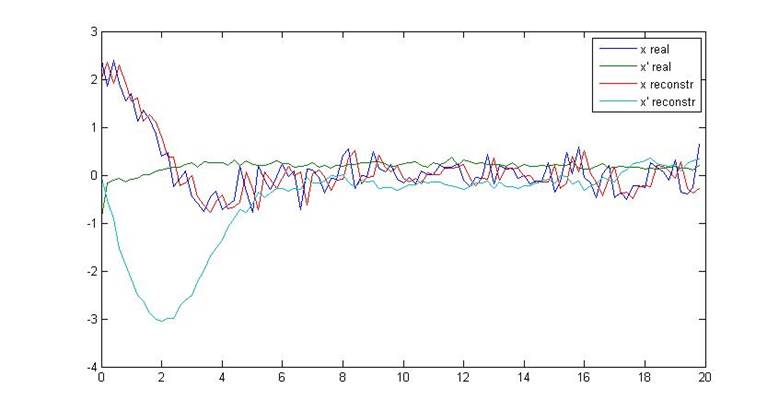
Рис.10. Переходные процессы объекта и наблюдателя
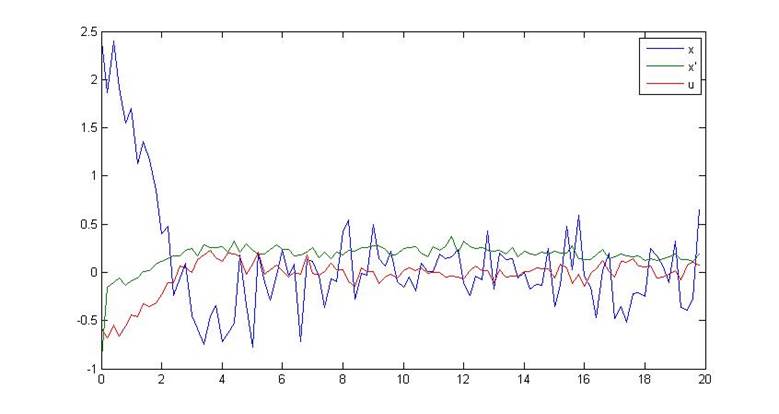
Рис.11. Переходный процесс замкнутой системы
Как видно из приведенных графиков, наблюдатель Люенбергера не справляется с задачей фильтрации помех и, следовательно, не может использоваться в системах, подвергающихся воздействию шумов.
Определить параметры переходного процесса в данном случае не представляется возможным.
Значение критерия J= 155.7041
4.2. Исследование системы с наблюдателем Калмана
Параметры дискретной модели, как и значения математического ожидания и дисперсии, аналогичны таковым из исследования системы с наблюдателем Люенбергера.
4.2.1. Исследование системы без воздействия шума.
Исследование системы при K1=K2=0
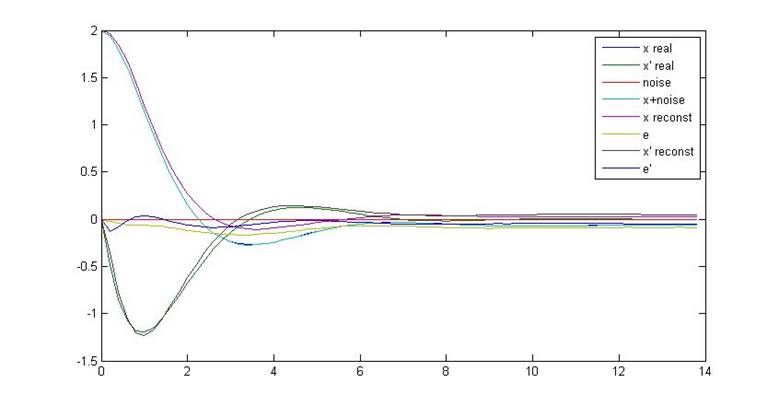
Рис.12. Переходные процессы объекта и наблюдателя
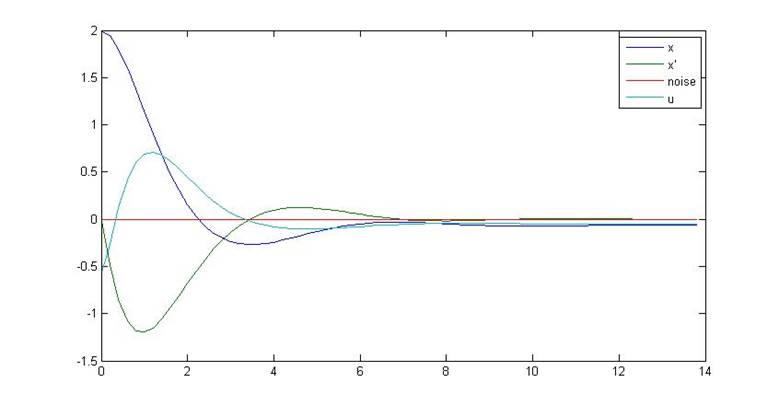
Рис.13. Переходный процесс замкнутой системы
Параметры переходного процесса замкнутой системы:
tпп=7 c
µ=1
g=30%
J= 33.4207
Однако, как видно из приведенных графиков, в данном случае имеет место статическая ошибка, вносящая погрешность в значение xf и делающая его отличным от нуля (более того – при подаче на вход системы нулевого сигнала в системе наблюдались переходные процессы). Для устранения статической ошибки в параметрах программы математическое ожидание было выставлено равным нулю, после чего повторено снятие данных при тех же параметрах системы.
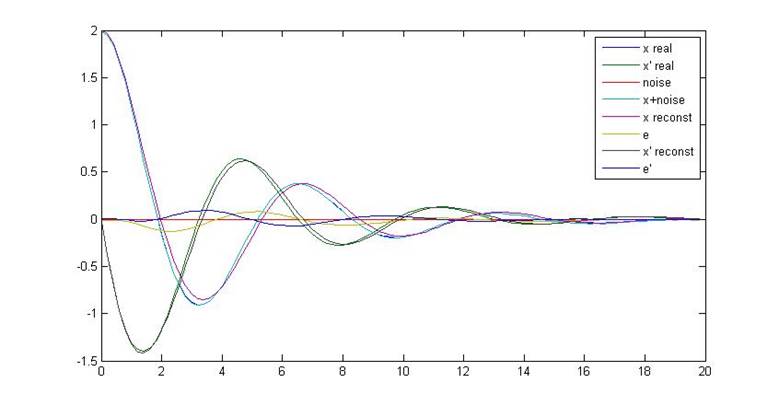
Рис.14. Переходные процессы объекта и наблюдателя

Рис.15. Переходный процесс в замкнутой системе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.