 Санкт-Петербургский
Государственный Политехнический Университет
Санкт-Петербургский
Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерные Системы и Программные Технологии
О Т Ч Ё Т
о лабораторной работе
«Моделирование объектов систем компьютерного управления, сбор и фиксация результатов моделирования.»
|
Выполнили: |
гр. 4081/11 А
|
|
Преподаватель: |
|
Санкт-Петербург
2011 г
.
1. Цель Работы.
· Изучение методики моделирования непрерывных объектов на аналоговом вычислительном комплексе.
· Знакомство с организацией системы сбора информации на базе платы сопряжения L-154 и персонального компьютера.
· Оценка точности моделирования объектов управления средствами аналоговой вычислительной техники.
2. Методика моделирования
Методика строится на использовании основных положений теории математического подобия, позволяющей установить подобие физических процессов в аналоговой модели и объекте. Программирование решения этих зависимостей на АВК заключается в создании схем, состоящих из ОУ и вспомогательных элементов так, чтобы физические процесс в них описывались математическими зависимостями.
1) Составление схемы набора решающих элементов, обеспечивающей преобразование «машинных переменных» в соответствии с исходной математической зависимостью, описывающей поведение моделируемого объекта. («Качественное подобие»).
2) Установление количественных зависимостей между исходными и машинными переменными, а также определение значения коэффициентов передач решающих элементов.
3. Схема набора и расчет ее параметров
В данной лабораторной работе рассматривается объект, заданный линейным дифференциальным уравнением второго порядка:
![]()
![]()
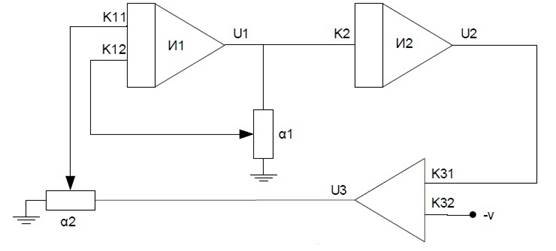
Рис 1. Схема набора.
Составим машинные уравнения:
![]()
![]()
![]()
Где: ![]()
![]()
![]()
![]()
![]()
Тогда дифференциальное уравнение в машинной записи будет выглядеть так:
![]()
Сопоставив это уравнение с исходным, сможем найти соотношения их коэффициентов:
![]()
![]()
![]()
Зададим ![]() , тогда:
, тогда:
![]()
![]()
![]()
4. Проведение эксперимента
Исходные значения:
a0 = 2.5
b = 2.5
a2 = 1
Значение коэффициента, соответствующее точке бифуркации:
aбф = ![]() =3,1622
=3,1622
4.1 Коэффициент a1 = 0, начальные условия x(0) = 2 x’(0) = 0, внешнее воздействие c = 0.
Аналитическое решение:
![]()
![]()
В дальнейшем для построения теоретических зависимостей будет использоваться скрипт для программы MATLAB, текст скрипта приведён в Приложении 1.
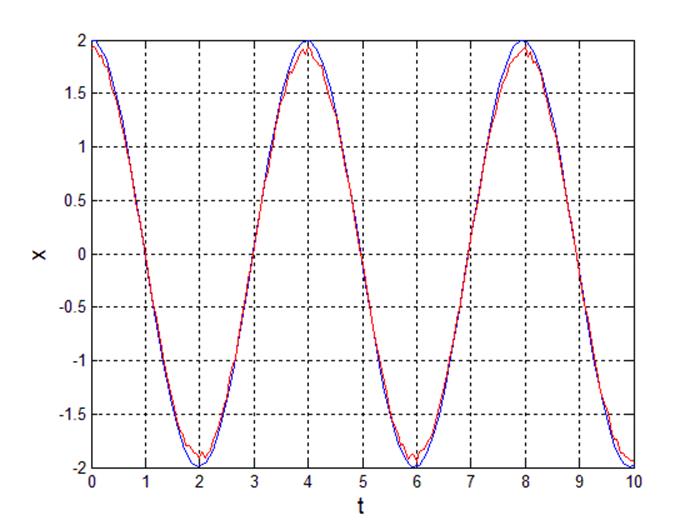
Рис 2. Переходный процесс выходного сигнала.
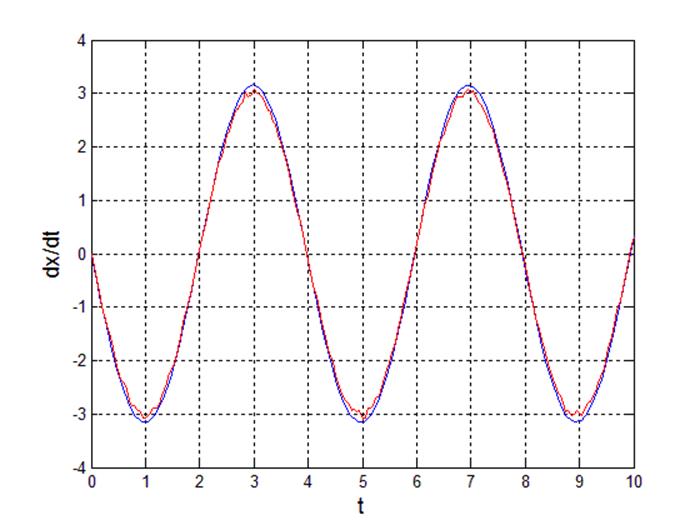
Рис 3. Переходный процесс производной выходного сигнала
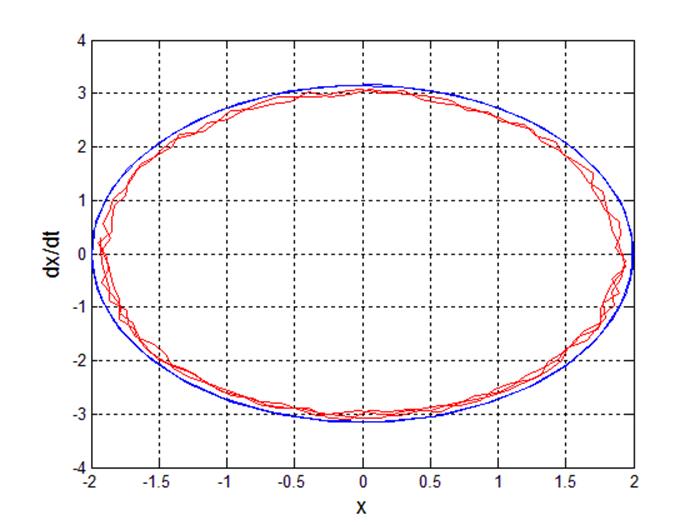
Рис 4. Фазовый портрет системы
4.2 Коэффициент a1 = aбф, начальные условия x(0) = 2 x’(0) = 0, внешнее воздействие c = 0.
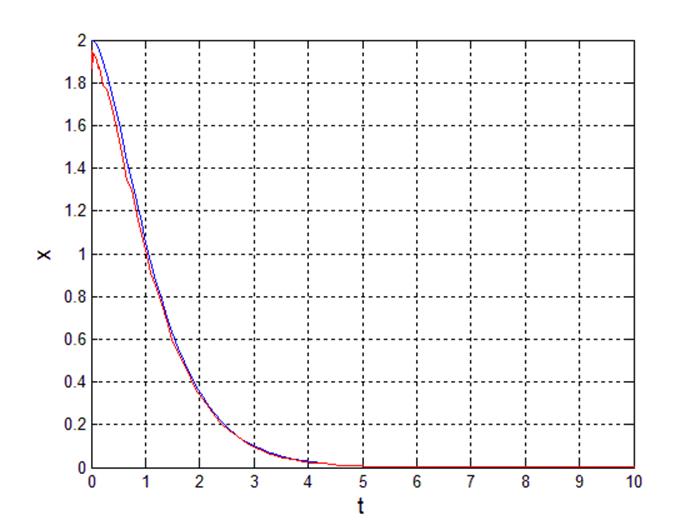
Рис 5. Переходный процесс выходного сигнала.
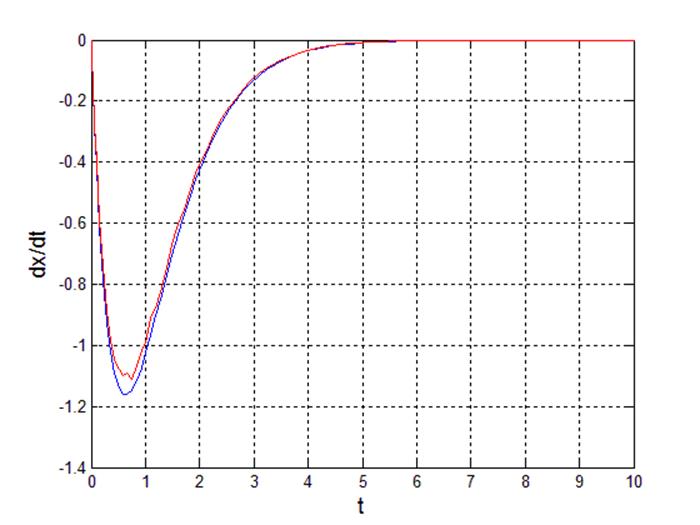
Рис 6. Переходный процесс производной выходного сигнала
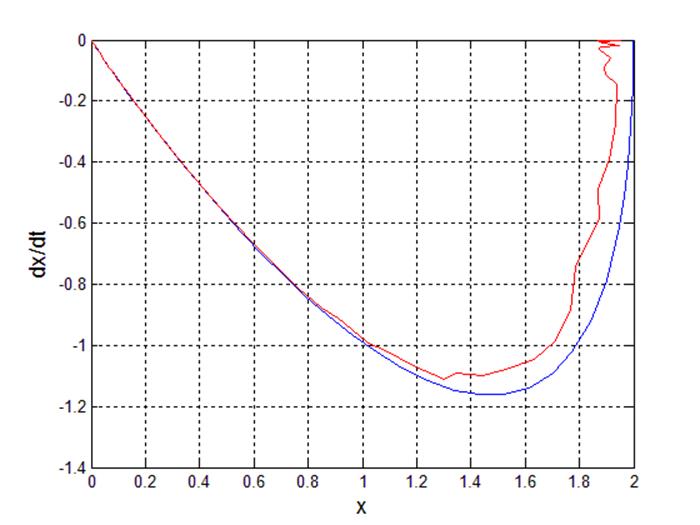
Рис 7. Фазовый портрет системы
4.3 Коэффициент a1 = 2aбф, начальные условия x(0) = 2 x’(0) = 0, внешнее воздействие c = 0.
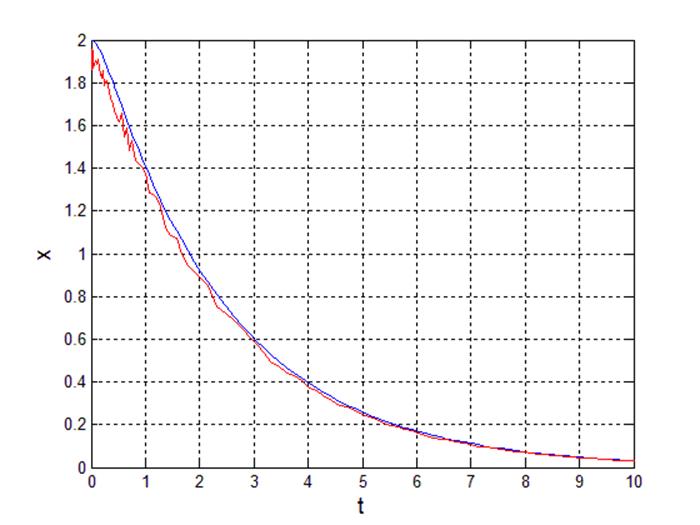
Рис 8. Переходный процесс выходного сигнала.
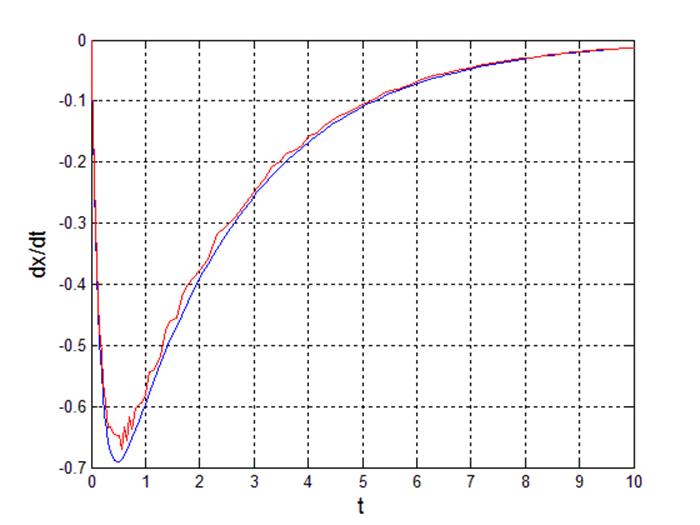
Рис 9. Переходный процесс производной выходного сигнала
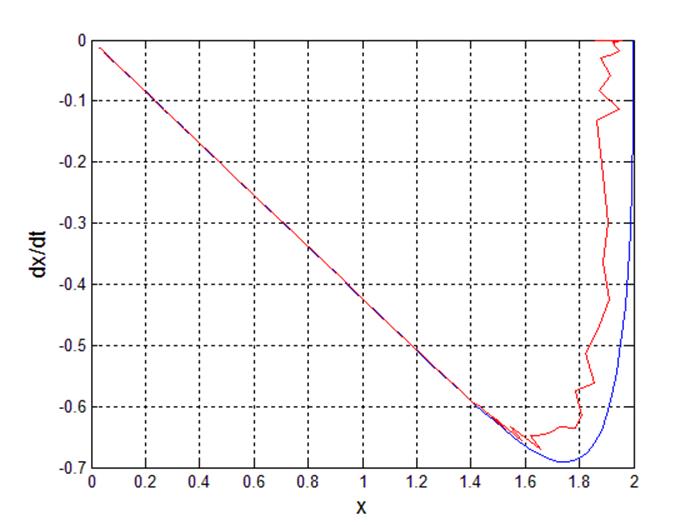
Рис 10. Фазовый портрет системы
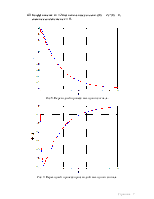
4.4 Коэффициент a1 = 0,5aбф, начальные условия x(0) = 2 x’(0) = 0, внешнее воздействие c = 0.
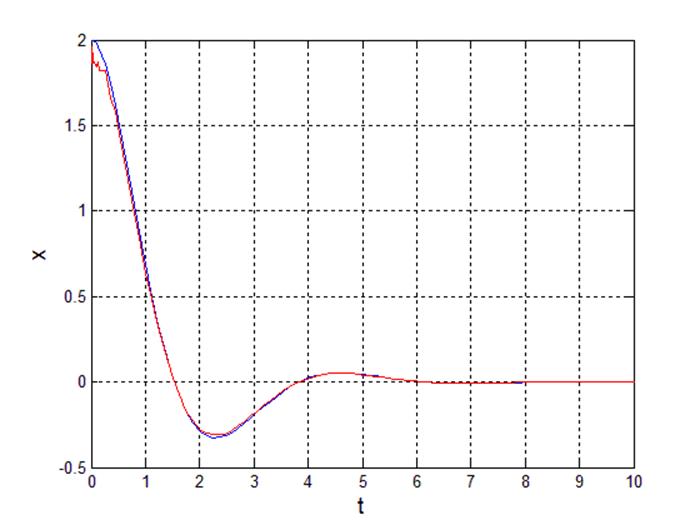
Рис 11. Переходный процесс выходного сигнала.
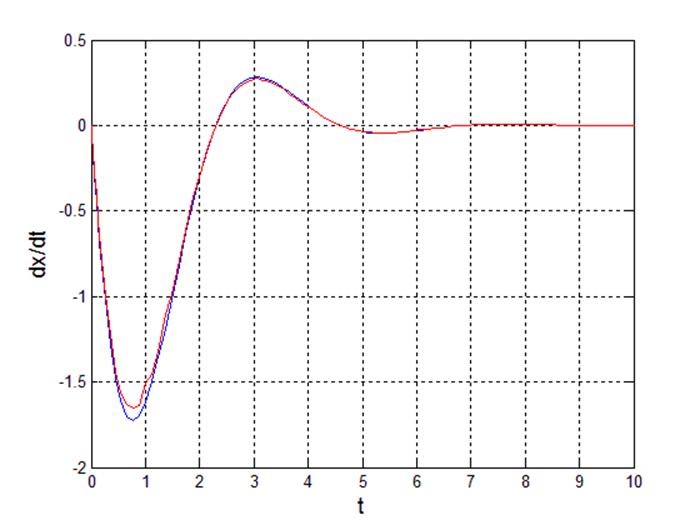
Рис 12. Переходный процесс производной выходного сигнала
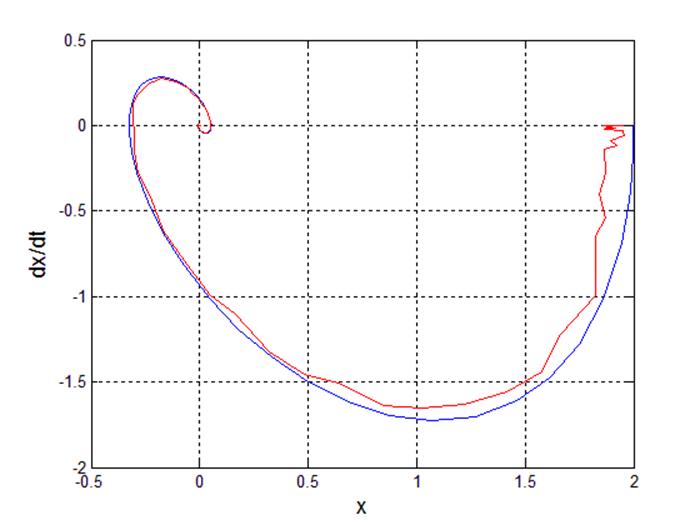
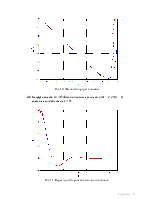
Рис 13. Фазовый портрет системы
4.5 Коэффициент a1 = 0, начальные условия x(0) = x’(0) = 0, внешнее воздействие c = 2.
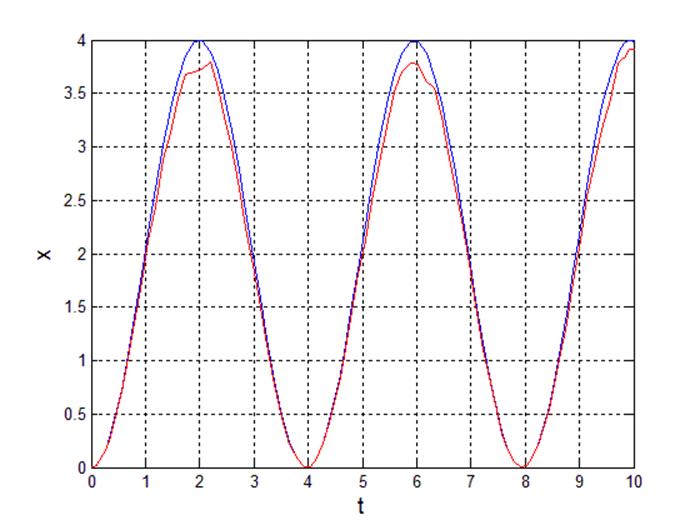
Рис 14. Переходный процесс выходного сигнала.
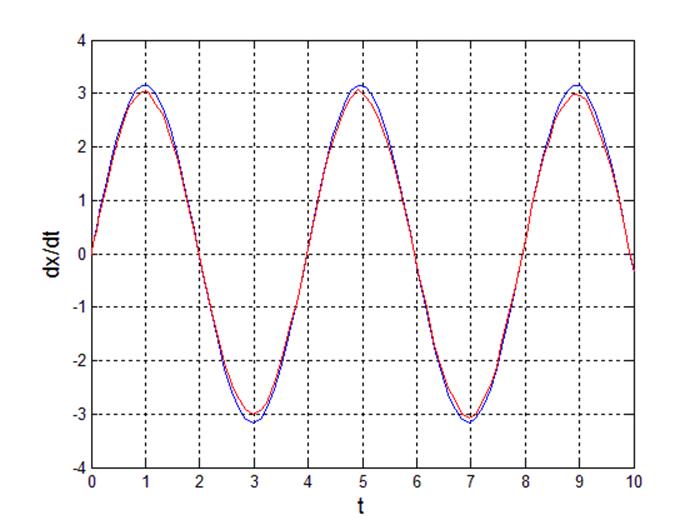
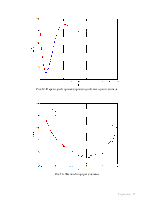
Рис 15. Переходный процесс производной выходного сигнала
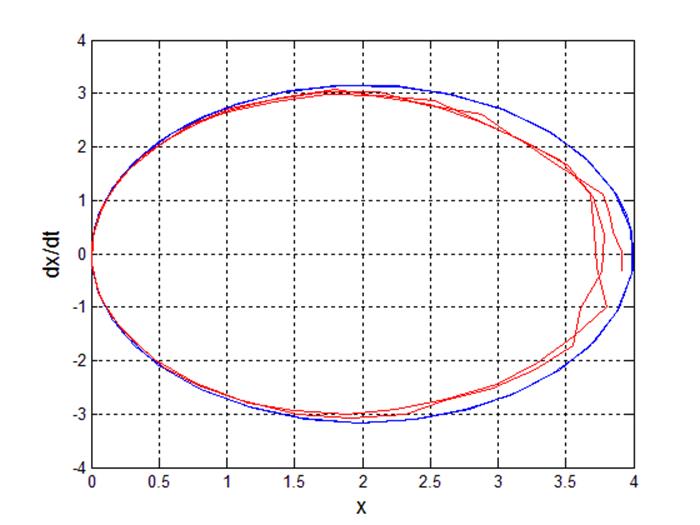
Рис 16. Фазовый портрет системы
4.6 Коэффициент a1 = aбф, начальные условия x(0) = x’(0) = 0, внешнее воздействие c = 2.
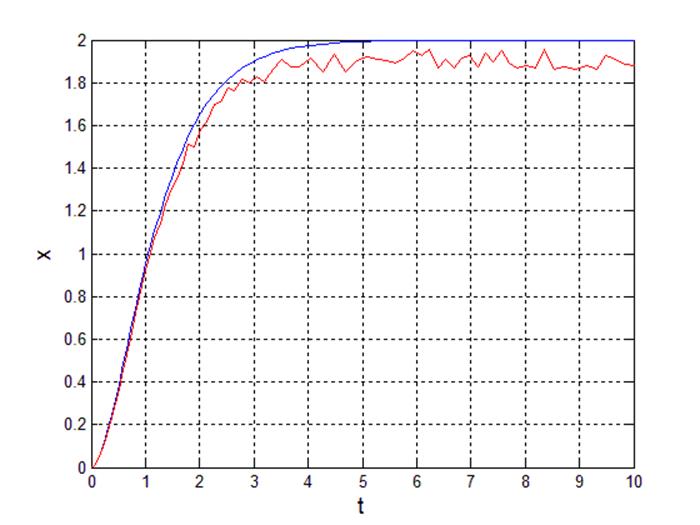
Рис 17. Переходный процесс выходного сигнала.
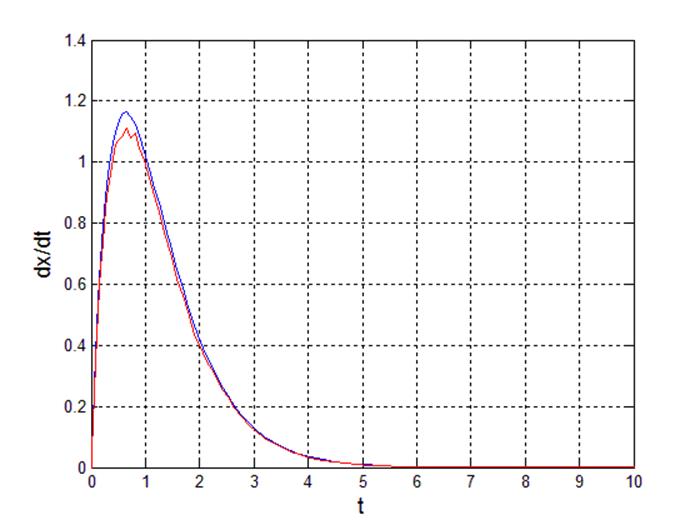
Рис 18. Переходный процесс производной выходного сигнала
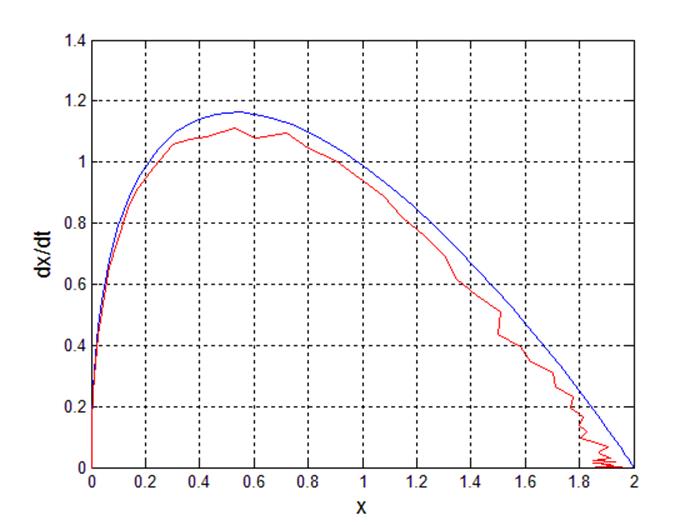
Рис 19. Фазовый портрет системы
4.7 Коэффициент a1 =2 aбф, начальные условия x(0) = x’(0) = 0, внешнее воздействие c = 2.
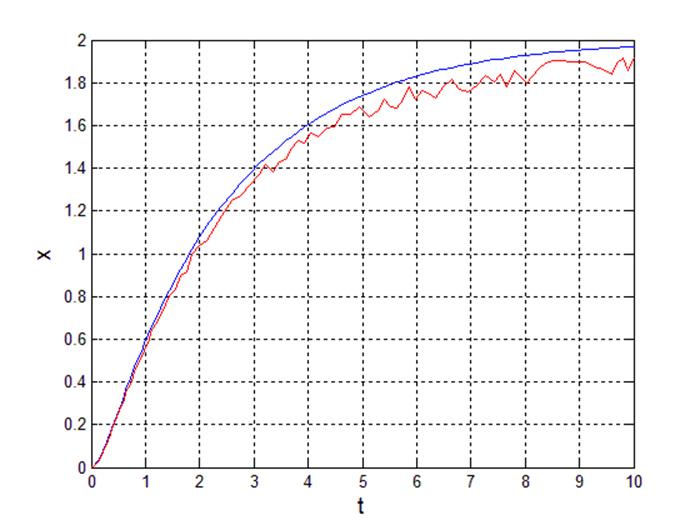
Рис 20. Переходный процесс выходного сигнала.
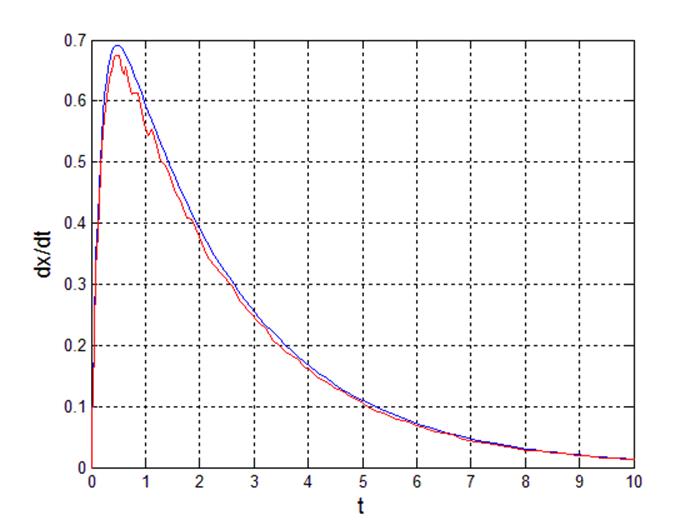
Рис 21. Переходный процесс производной выходного сигнала
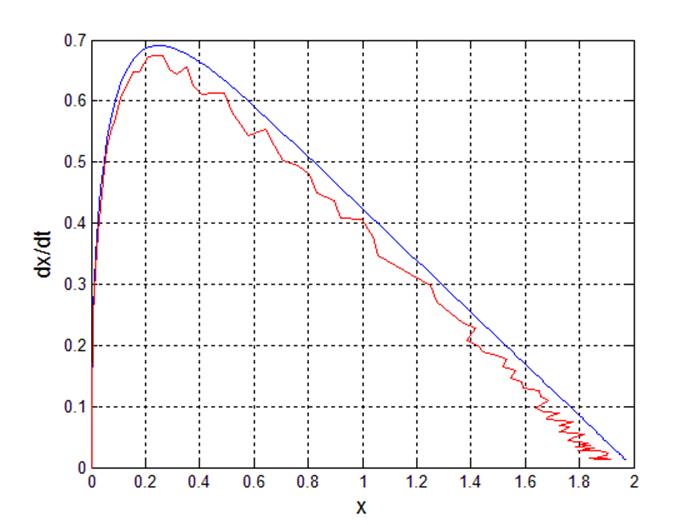
Рис 22. Фазовый портрет системы
4.8 Коэффициент a1 = 0,5aбф, начальные условия x(0) = x’(0) = 0, внешнее воздействие c = 2.
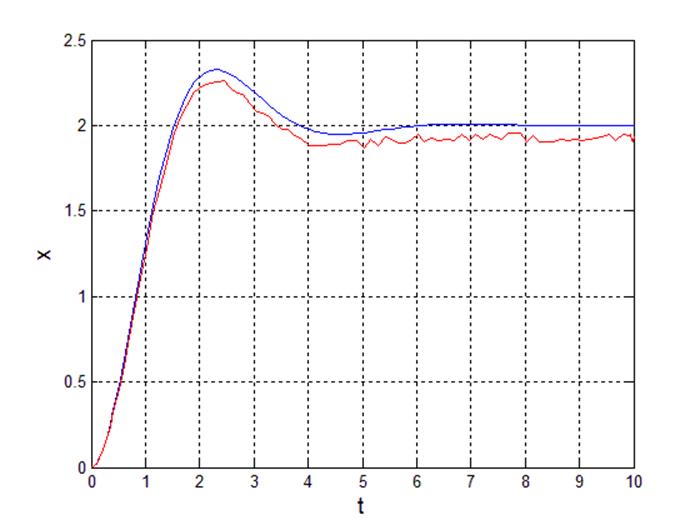
Рис 23. Переходный процесс выходного сигнала.
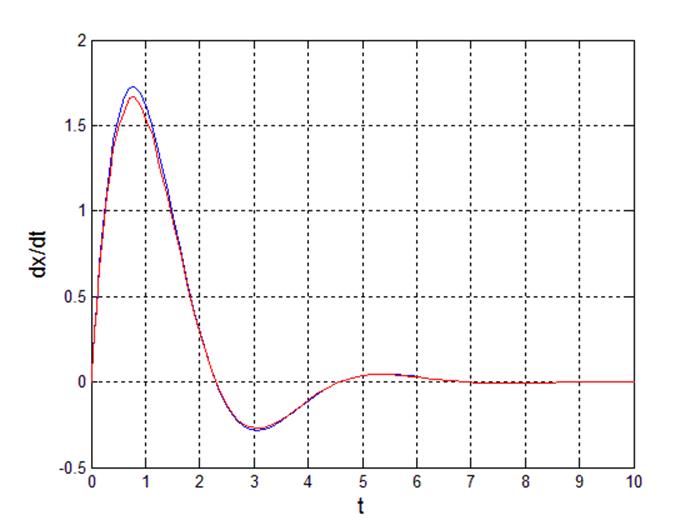
Рис 24. Переходный процесс производной выходного сигнала
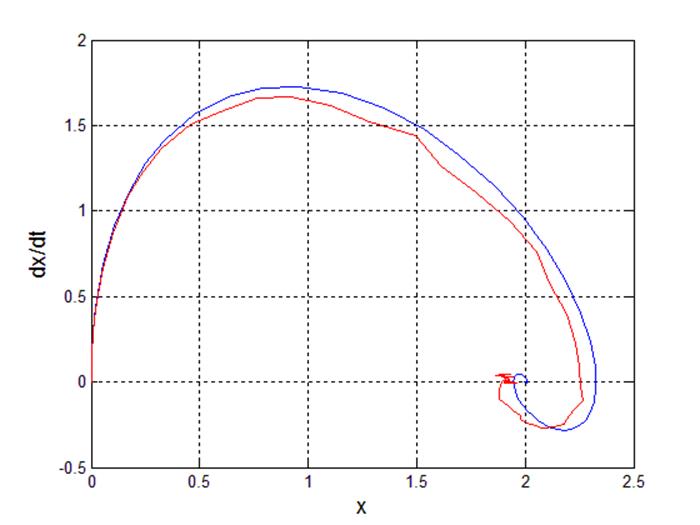
Рис 25. Фазовый портрет системы
5. ПРИЛОЖЕНИе 1.
function Main( )
% Коэффициенты дифференциального уравнения
global b;
global a0;
global a1;
global a2;
% Возмущающее воздействие
global c;
a0 = 2.5; % Коэффициент A0
b = 2.5; % Коэффициент B
a2 = 1; % Коэффициент A2
c = 2; % Внешнее воздействие
a1bf = 2*sqrt( a0 ); % Точка бифуркации
a1 = 0.5*a1bf; % Коэффициент A2
% Время моделирования
t0 = 0; tf = 10;
% Начальные условия
x0 = 0;
dxdt0 = 0;
% Решение уравнения
[ t, X ] = ode45( 'fun_du', [t0 tf] , [ x0; dxdt0 ]);
%%%%%%%%%%% Переходный процесс x(t) %%%%%%%%%%%
hFigure1 = figure('Color',[1 1 1]);
hAxes1 = axes('Visible','on','Parent',hFigure1);
box('on');
hold('all');
grid on;
xlabel( hAxes1, 't','FontSize',13); ylabel(hAxes1, 'x','FontSize',13);
hPlot1 = plot( t, X(:,1) );
set( hPlot1, 'color','b', 'LineWidth', 1)
%%%%%%%%%%% Переходный процесс по производной %%%%%%%%%%%
hFigure2 = figure('Color',[1 1 1]);
hAxes2 = axes('Visible','on','Parent',hFigure2);
box('on');
hold('all');
grid on;
xlabel(hAxes2, 't','FontSize',13); ylabel(hAxes2, 'dx/dt','FontSize',13);
hPlot2 = plot( t, X(:,2) );
set( hPlot2, 'color','b', 'LineWidth', 1)
%%%%%%%%%%% Фазовые траектории %%%%%%%%%%%
hFigure3 = figure('Color',[1 1 1]);
hAxes3 = axes('Visible','on','Parent',hFigure3);
box('on');
hold('all');
grid on;
xlabel( hAxes3, 'x','FontSize',13); ylabel(hAxes3,'dx/dt', 'FontSize',13);
hPlot3 = plot( X(:,1), X(:,2) );
set( hPlot3, 'color','b', 'LineWidth', 1);
end
function dXdt = fun_du( t, X )
global b;
global c;
global a0;
global a1;
global a2;
x = X(1);
y = X(2);
dXdt = [ y;
(1/a2)*(b*c - a1*y - a0*x ) ];
end
6. ВЫВОДЫ
Экспериментальные результаты моделирования объекта, описываемого линейным дифференциальным уравнением второго порядка, с помощью стенда АВК-31наглядно показали достаточную точность вычислений. Расхождение теоретических и практических значений может быть вызвано отклонением номинала аналоговых величин.
Характер переходного процесса зависит от коэффициентов уравнения:
· при a0=0 наступают незатухающие колебания;
· при a0=0,5aбф процесс имеет малую степень колебательности;
· при увеличении коэффициента увеличивается быстродействие, и процесс
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.