A = [ 0 1; -5 –sqrt(5)/2 ];
n = 10;
eps = 0.05;
step = 0.05;
for i = 1:n
k1 = (i-1)/10;
for j = 1:n
k2 = (j-1)/10;
sim('model');
xx(j,i) = k1;
yy(j,i) = k2;
zz(j,i) = J(length(J));
end
end
contour(xx, yy, zz,100)
hold on;
k1s=1.5;
k2s=1.5;
delta=0.001; % длина пробного шага
stlen = 0.1; % длина основного шага
eps = 0.0001;
i = 0;
cnt = 0;
while i == 0
cnt=cnt+1;
k1 = k1s;
k2 = k2s;
sim('model');
Js = J(length(J));
k1 = k1s - delta;
k2 = k2s;
sim('model');
J1 = J(length(J));
k1 = k1s;
k2 = k2s - delta;;
sim('model');
J2 = J(length(J));
% Определение составляющих градиента
grad1 = (J1 - Js)/delta;
grad2 = (J2 - Js)/delta;
% Массив градиентов на каждом шаге
G(:, cnt) = [grad1; grad2];
% Новые коэффициенты ОС
k1f = k1s + stlen*grad1;
k2f = k2s + stlen*grad2;
plot([k1s,k1f],[k2s,k2f])
% Проверка останова
if ( abs(max( stlen*grad1, stlen*grad2 )) < eps )
break;
end
% Переход в новую точку
k1s = k1f;
k2s = k2f;
end
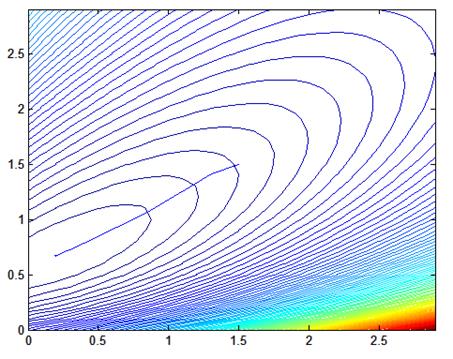
Рис. 2.1. Процесс поиска, шаг = 0.05, начальные значения Кп = 1.5, Кд = 1.5
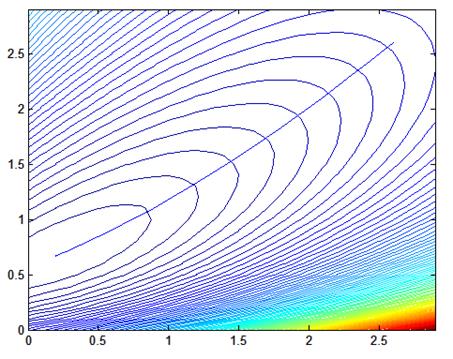
Рис. 2.2. Процесс поиска, шаг = 0.05, начальные значения Кп = 2.6, Кд = 2.6
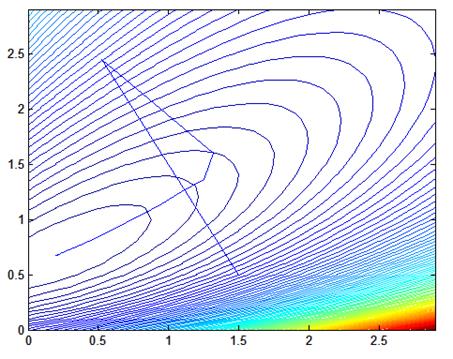
Рис. 2.3. Процесс поиска, шаг = 0.05, начальные значения Кп = 1.5, Кд = 0.5

Рис. 2.4. Процесс поиска, шаг = 0.05, начальные значения Кп = 0.2, Кд = 0.5
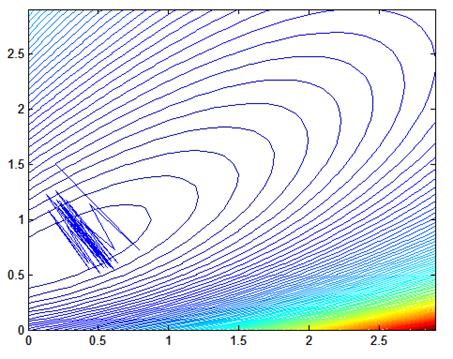
Рис. 2.5. Процесс поиска, шаг = 0.05, начальные значения Кп = 0.2, Кд = 1.5
Таблица 2.1. Результаты моделирования
|
Величина шага |
Начальная точка |
Конечная точка |
Число итераций |
Время поиска, с |
|||
|
КП |
КД |
КП |
КД |
J |
|||
|
0,05 |
2,6 |
2,6 |
0,195 |
0,67 |
17,16 |
60 |
12,61 |
|
0,05 |
1,5 |
1,5 |
0,21 |
0,69 |
17,16 |
44 |
12,61 |
|
0,05 |
1,5 |
0,5 |
0,20 |
0,673 |
17,16 |
54 |
12,61 |
|
0,05 |
0,2 |
0,5 |
0,41 |
0,89 |
17,16 |
46 |
12,61 |
|
0,05 |
0,2 |
1,5 |
0,41 |
0,89 |
17,16 |
34 |
12,61 |
Используя градиентный метод, можно получить большую точность.
3. Влияние дискретизации
Изменение параметров поисковых самонастраивающихся систем происходит в результате поиска экстремума заданного критерия качества, и носит дискретный характер. Одним из основных условий работоспособности системы является устойчивость первичного контура. При заданной дискретности регулятора и при заданном диапазоне изменения параметров объекта можно получить диапазон параметров регулятора, для которых первичный контур будет устойчивым.
Первичный контур описывается в переменных состояний уравнениями:
![]()
c2d(ss(A,B,C,D),0.1) - для примера взяли T = 0.1 c
Дискретная матрица объекта:
[ 0.982-0.00391*k1, 0.089-0.00391*k2]
[ -0.089*k1-0.089, 0.9-0.089*k2]
Для устойчивости необходимо чтобы собственные числа матрицы были меньше 1, т.е. λi<1.
![]()
lmd^2 + (0.00391*k1 + 0.089*k2 - 1.9)*lmd + 0.003786*k1 - 0.089*k2 + 0.909=0
a0 = 0.00376*k1 - 0.089*k2 + 0.909
a1 = 0.00391*k1 + 0.089*k2 - 1.9
a2 = 1
Билинейное преобразование, для того чтобы применить критерий Гурвица:
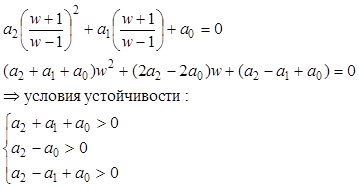
Граничные условия:
a2+a1+a0 = 0.0077*k1 + 0.009>0
a2-a0 = 0.089*k2 - 0.00376*k1 + 0.091>0
a2-a1+a0 = 3.801 - 0.18*k2 - 0.00015*k1>0
В алгоритме работы вторичного контура следует предусмотреть выполнение граничных условий для параметров регулятора.
Для исследования влияния дискретизации следует ввести фиксатор нулевого порядка в модель поисковой системы рис. 1.1.
Выводы
В данной работе мы построили систему экстремального регулирования с использованием двух методов: покоординатного спуска и градиентного.
По результатам исследований алгоритма покоординатного спуска можно отметить, что он дает сравнительно низкую точность определения коэффициентов, соответствующих минимуму ЛК-критерия качества, при значительных затратах времени. Также увеличение точности при уменьшении шага приводит к увеличению временных затрат.
Второй, рассмотренный нами метод, (градиентный) обеспечивает большую точность определения оптимальных критериев и позволяет сократить время выполнения одного шага поиска (настройки). В тоже время можно отметить увеличение числа итераций (шагов). Недостатком данного метода является зависимость от вида минимизируемой функции (присутствие/отсутствие овражности). Если «подход» к экстремуму происходит с длинной стороны оврага, то увеличивается число мелких шагов (в ином случае можно проскочить точку, если значение градиента большое). Данный недостаток устраним путем изменения алгоритма/способа выбора длины шага.
Увеличение периода дискретизации ведет к изменению времени подстройки параметров (поиска). Изменение дискретизации связано с изменением диапазона значений параметров регулятора, в пределах которых будет происходить настройка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.