|
T0 |
Ad |
Bd |
|
0.001 |
1.0000 0.0010 -0.0050 0.9989 |
0.0000 0.0050 |
|
0.005 |
0.9999 0.0050 -0.0249 0.9944 |
0.0001 0.0249 |
|
0.01 |
0.9998 0.0099 -0.0497 0.9886 |
0.0002 0.0497 |
|
0.05 |
0.9939 0.0485 -0.2426 0.9396 |
0.0061 0.2426 |
|
0.1 |
0.9760 0.0938 -0.4691 0.8711 |
0.0240 0.4691 |
|
0.5 |
0.5271 0.3084 -1.5422 0.1823 |
0.4729 1.5422 |
|
1 |
-0.1978 0.2188 -1.0941 -0.4425 |
1.1978 1.0941 |
Расчет оптимального управления параметров дискретной системы.
Стационарное дискретное уравнение Риккати:
![]() (23)
(23)
Решением данного уравнения является значение P*, по которому можно определить оптимальные значения коэффициентов обратной связи по следующей формуле:
![]()
Аналитическое решение уравнения (22) затруднено в связи с очень громоздкой результирующей системой уравнений. Будем решать уравнение (23) итерационным способом по алгоритму:
1. Pi = Q, i=1
2.
![]()
3.
![]()
4.
Если ![]() , то
, то ![]() ,
, ![]() и
переход к шагу 5, иначе
и
переход к шагу 5, иначе
![]() и переход к шагу 2.
и переход к шагу 2.
5. Конец.
r1_6.m
clear all;
clc;
T0 = [0.1 0.5 1];
a0 = 0.5;
A = [0 1; -a0 -0.8];
B = [0; a0];
Q = [1 0; 0 0];
R = 1;
for i=1:length(T0)
Ad = eye(2);
Bd = eye(2)*T0(i);
for j=1:100
Ad = Ad + A^j*T0(i)^j/factorial(j);
Bd = Bd + A^j*T0(i)^(j+1)/factorial(j+1);
end
Bd = Bd*B;
Pprev = Q;
while 1
K = ( R + Bd' * Pprev * Bd ) ^ (-1) * Bd' * Pprev * Ad;
P = Q + Ad'* Pprev *Ad - K' * ( R + Bd'* Pprev *Bd ) * K;
dP = P - Pprev;
if abs(norm( dP )) < 0.001
break;
end;
Pprev = P;
end;
P
K
end
Таблица 4.2. Значения оптимальных коэффициентов
|
T0 |
Popt |
Kopt |
I |
|
0.001 |
1.0e+003 * 1.3359 0.0828 0.0828 0.1763 |
0.4108 0.8767 |
1.0731 |
|
0.005 |
267.5920 16.5590 16.5590 35.6591 |
0.3984 0.8679 |
2.9452 |
|
0.01 |
134.0497 8.2850 8.2850 18.0853 |
0.3832 0.8569 |
3.5682 |
|
0.05 |
27.2348 1.6921 1.6921 4.0541 |
0.2673 0.7729 |
4.8236 |
|
0.1 |
13.9051 0.9000 0.9000 2.3345 |
0.1387 0.6769 |
5.3635 |
|
0.5 |
3.2774 0.4344 0.4344 1.1850 |
-0.3790 0.2035 |
6.2392 |
|
1 |
1.6934 0.3633 0.3633 1.2421 |
-0.4162 -0.0448 |
7.2397 |
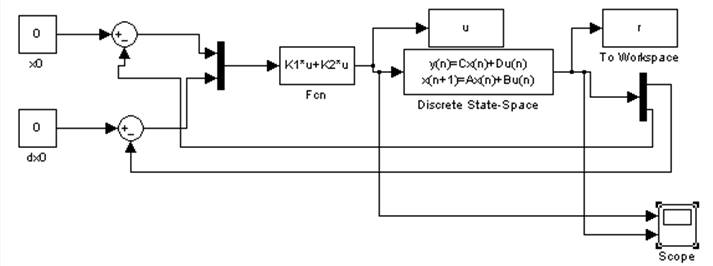
Рис. 4.1. Структурная
схема модели, реализующей уравнение объекта ![]()
formAd.m
function Ad = formAd()
global T0
a0=5;
A = [0 1; -a0 -sqrt(5)/2];
E = [1 0;0 1];
Ad = 0;
for n = 1:1:20
Ad = Ad+A^n*T0^n/factorial(n);
end
Ad = E + Ad
end
formBd.m
function Bd = formBd()
global T0
a0=5;
E = [1 0;0 1];
A = [0 1; -a0 -sqrt(5)/2];
B = [0; a0];
Bd = E*T0;
for n=1:1:20
Bd = Bd+A^n*T0^(n+1)/factorial(n+1);
end
Bd = Bd*B
end
r1_7.m
T0 = 1;
a0=5;
A = [0 1; -a0 -sqrt(5)/2];
B = [0; a0];
E = eye(2);
Q = [1 0; 0 1];
R = 1;
Ad = 0;
Bd = E*T0;
for n = 1:100
Ad = Ad+A^n*T0^n/factorial(n);
Bd = Bd+A^n*T0^(n+1)/factorial(n+1);
end
Ad = E+Ad;
Bd = Bd*B;
P = Q;
cnt = 1;
eps = 1e-3;
while 1
K = ( R + Bd' * P * Bd ) ^ (-1) * Bd' * P * Ad;
Pn = Q + Ad'*P*Ad - K' * ( R + Bd'*P*Bd ) * K;
dP = Pn - P;
if abs(norm( dP )) < eps
Popt = P;
Kopt = K;
break;
end;
P = Pn;
cnt = cnt + 1;
end;
Popt
Kopt
K1 = Kopt(1)
K2 = Kopt(2)
T0
Ad = formAd()
Bd = formBd()
sim('r1_7s')
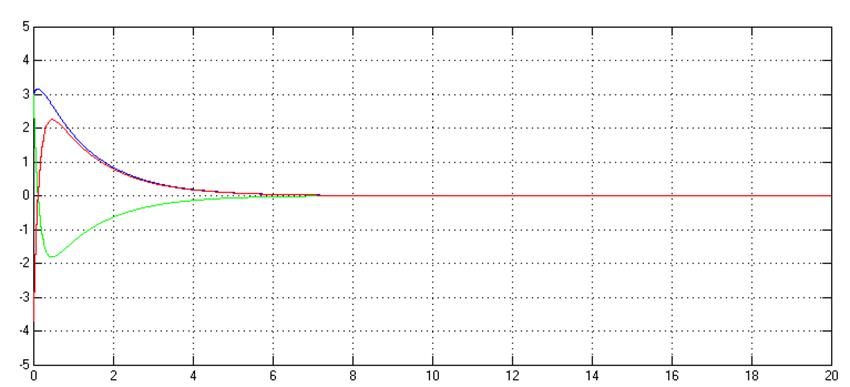
Рис. 4.2. Графики
зависимостей ![]() и
и![]() дискретной
системы при Т0=0,01с
дискретной
системы при Т0=0,01с
Графики для случаев T0 = 0.001 и T0 = 0.005 визуально неотличимы от представленных на рис. 4.2.
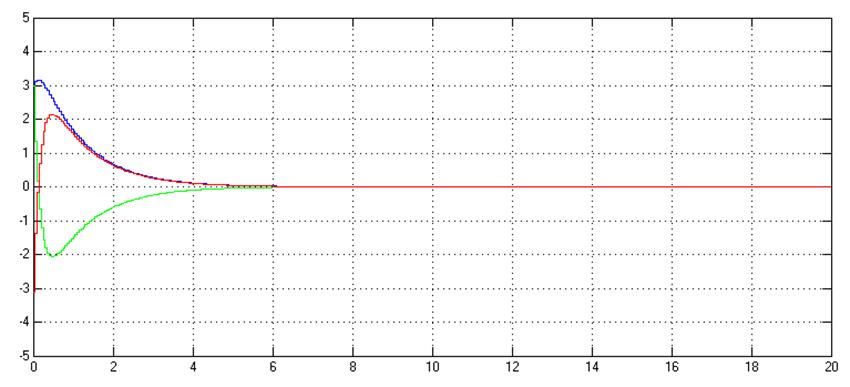
Рис. 4.3. Графики
зависимостей ![]() и
и![]() дискретной
системы при Т0=0,05с
дискретной
системы при Т0=0,05с
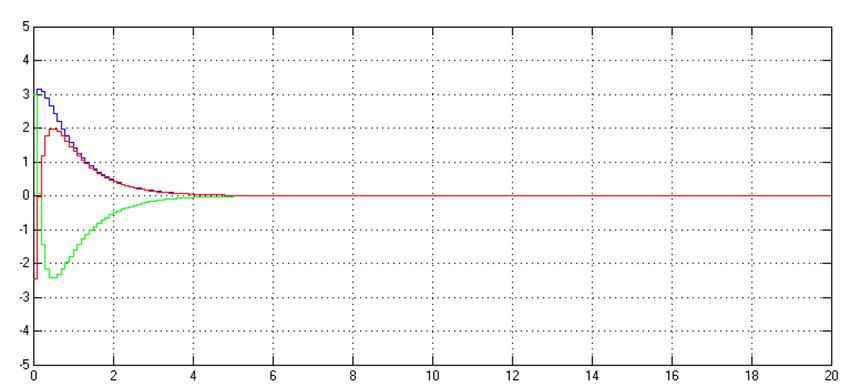
Рис. 4.4. Графики
зависимостей ![]() и
и![]() дискретной
системы при Т0=0,1с
дискретной
системы при Т0=0,1с
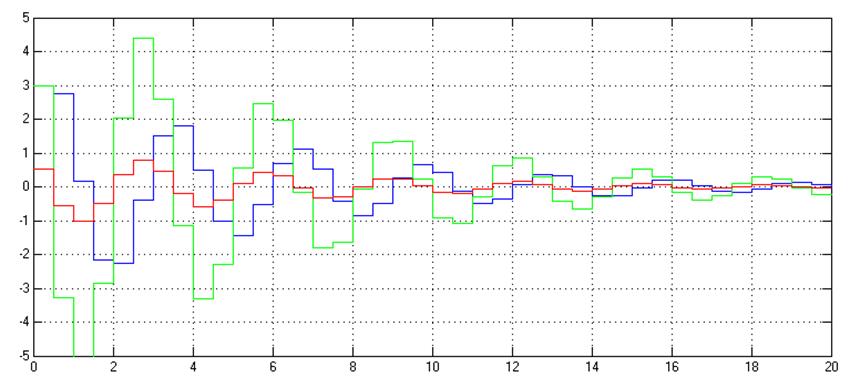
Рис.4.5. Графики
зависимостей ![]() и
и![]() дискретной
системы при Т0=0,5с
дискретной
системы при Т0=0,5с

Рис. 4.6. Графики
зависимостей ![]() и
и![]() дискретной
системы при Т0=1с
дискретной
системы при Т0=1с
Видно, что если при значениях T0 ≤ 0.1 характер и показатели качества процесса меняются незначительно, то при больших величинах периода дискретизации происходит существенное изменение характера процесса – появляется сильная колебательность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.