









Санкт-Петербургский государственный политехнический университет
Кафедра компьютерных систем и программных технологий
Расчетное задание №3
Построение и исследование процессов в беспоисковых адаптивных системах прямого типа
Работу выполнил:
студент гр. 5081/10
Работу проверил:
преподаватель
Санкт-Петербург
2012
1. Постановка задачи
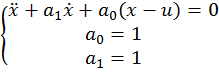
Объект задан дифференциальным уравнением второго порядка.
![]()
В работе производится построение и исследование процессов в беспоисковых адаптивных системах прямого типа.
2. Программа работы
Требуется:
1) Построить эталонную модель;
2) Исследовать процессы во вторичном контуре при интегральных билинейных законах настройки;
3) Провести модификацию исходных законов для улучшения процесса настройки.
3. Вариант задания
При исследовании использовался тот же объект, что и в предыдущих расчетных заданиях. Математическая модель объекта описывается следующим образом:
4. Подготовка к выполнению работы
Беспоисковые адаптивные системы с эталонной моделью (БАСЭМ) нужны для ликвидации разности выходов основного контура и эталонной модели, т.е. для ликвидации координатной ошибки. БАСЭМ представляют собой наиболее важный класс, т.к. для него все доказано наиболее строго.
Достоинства подхода:
· Формирование алгоритма адаптации происходит на основе легко доступных измеряемых величин, что определяет быстроту реакции.
· Не нужны дополнительные пробные движения.
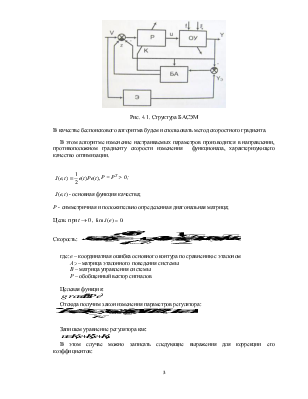
Структура БАСЭМ представлена на рисунке 4.1.
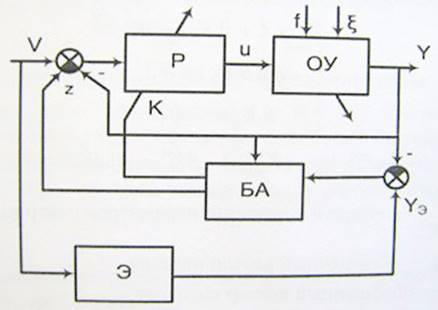
Рис. 4.1. Структура БАСЭМ
В качестве беспоискового алгоритма будем использовать метод скоростного градиента.
В этом алгоритме изменение настраиваемых параметров производится в направлении, противоположном градиенту скорости изменения функционала, характеризующего качество оптимизации.
![]() P
= PT
> 0;
P
= PT
> 0;
![]() - основная
функция качества;
- основная
функция качества;
P - симметричная и положительно определенная диагональная матрица;
Цель: при![]() ,
, ![]()
Скорость: ![]()
где: e – координатная ошибка основного контура по сравнению с эталоном
АЭ – матрица эталонного поведения системы
B – матрица управления системы
Р – обобщенный вектор сигналов
Целевая функция:
![]()
Отсюда получим закон изменения параметров регулятора:
![]()
Запишем уравнение регулятора как:
![]()
В этом случае можно записать следующие выражения для коррекции его коэффициентов:
где: ![]() - диагональные
элементы матрицы Г
- диагональные
элементы матрицы Г
![]() - ошибка по
- ошибка по ![]()
![]() - ошибка по
- ошибка по ![]()

5. Результаты исследований
5.1.Исходная система
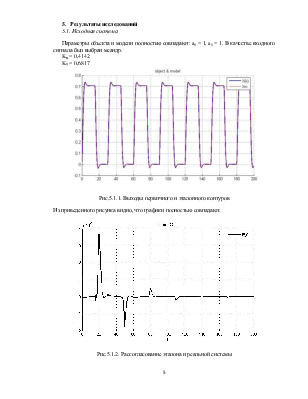
Параметры объекта и модели полностью совпадают: a0 = 1, a1 = 1. В качестве входного сигнала был выбран меандр.
Kп = 0,4142
Kд = 0,6817
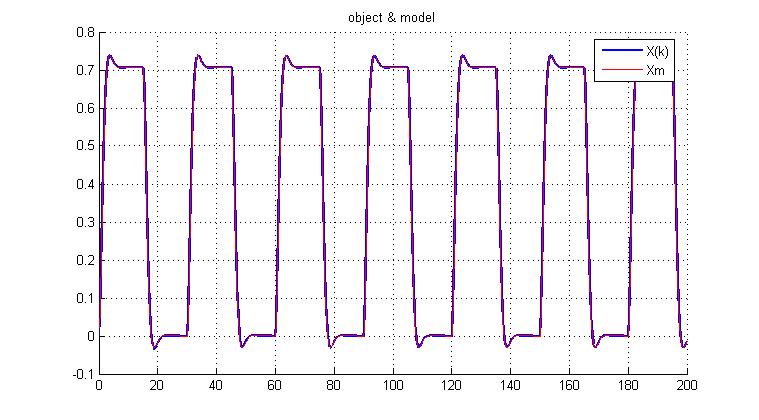
Рис.5.1.1. Выходы первичного и эталонного контуров
Из приведенного рисунка видно, что графики полностью совпадают.
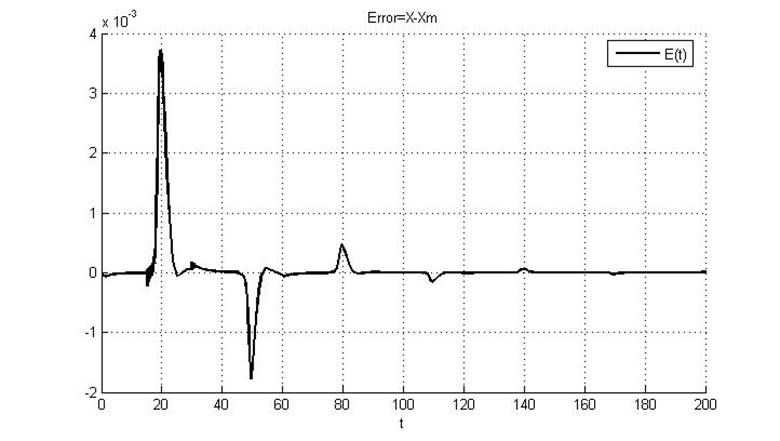
Рис.5.1.2. Рассогласование эталона и реальной системы
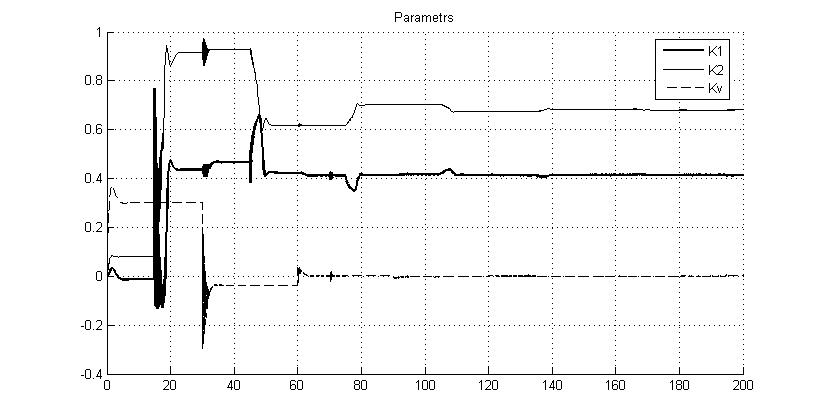
Рис.5.1.3. Графики параметров K1, K2 и Kv
Из рисунка видно, что параметр K1 (Kп) сходится к значению 0.41, а параметр K2 (Kд) – к значению 0.68.
5.2.Исходная система с небольшой структурной помехой
Произвели увеличение a0 в 2 раза, a0 = 2.
Пересчитаем оптимальные коэффициенты регулятора:
Kп = 0,2361
Kд = 0,5723
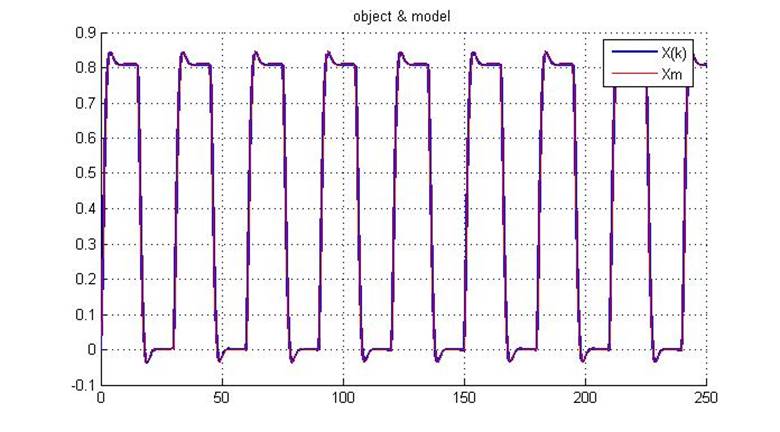
Рис.5.2.1. Выходы первичного и эталонного контуров
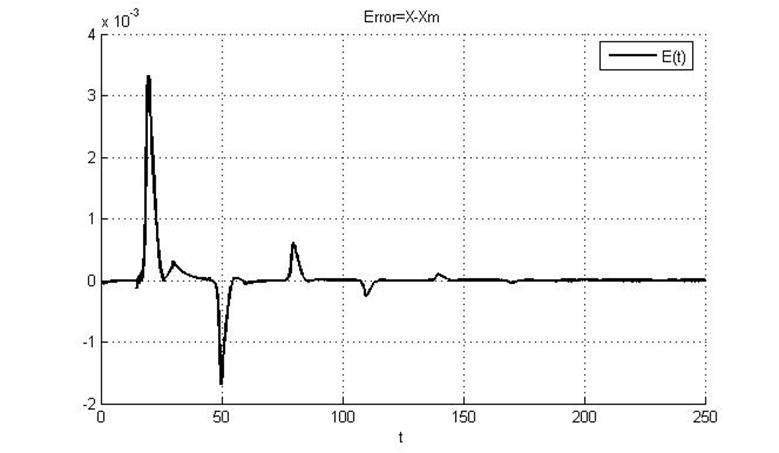
Рис.5.2.2. Рассогласование эталона и реальной системы
Видно, что при введении небольшой помехи график ошибки сходится за большее время.
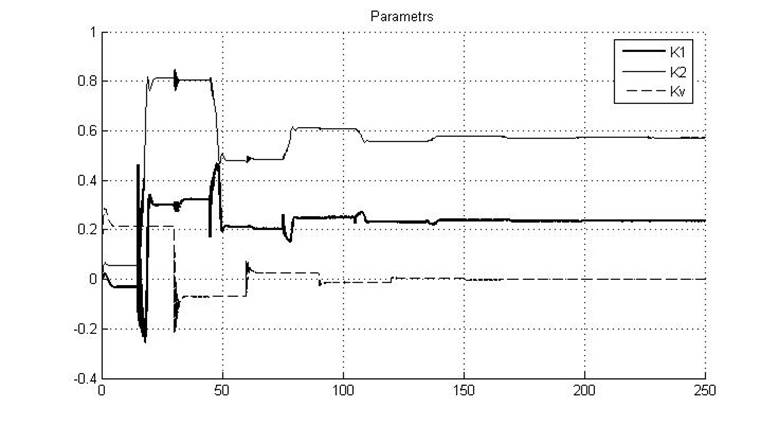
Рис.5.2.3. Графики параметров K1, K2 и Kv
Из рисунка видно, что параметр K1 (Kп) сходится к значению 0.23, а параметр K2 (Kд) – к значению 0.57.
5.3.Исходная система с большой структурной помехой
Произвели увеличение a0 в 10 раза, a0 = 10.
Пересчитаем оптимальные коэффициенты регулятора:
Kп = 0,0499
Kд = 0,4491
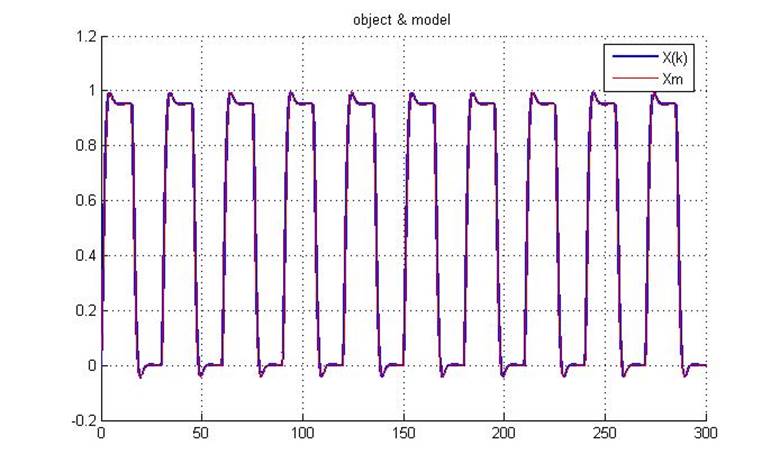
Рис.5.3.1. Выходы первичного и эталонного контуров
Из приведенного рисунка видно, что графики почти полностью совпадают.
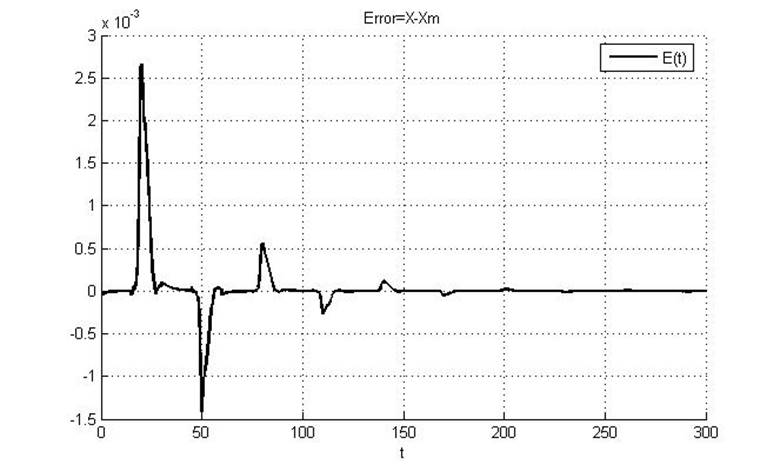
Рис.5.3.2. Рассогласование эталона и реальной системы
Видно, что при введении большой помехи график ошибки сходится за еще большее время, чем в предыдущем случае, когда a0=2.
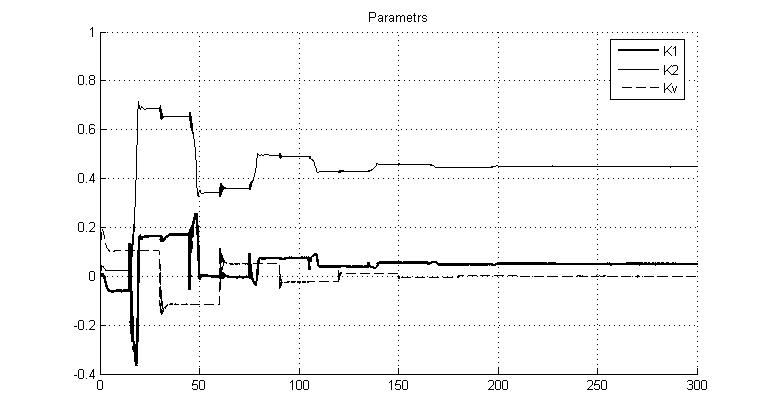
Рис.5.3.3. Графики параметров K1, K2 и Kv
Из рисунка видно, что параметр K1 (Kп) сходится к значению 0.05, а параметр K2 (Kд) – к значению 0.45.
5.4. Введение пропорционального члена
![]()
Исследование проводим при наличии небольших помех, как и в пункте 5.2
a0 = 2, a1 = 1
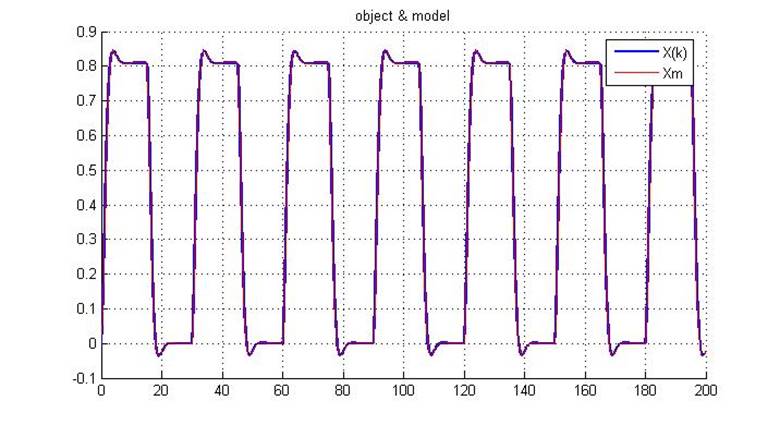
Рис.5.4.1. Выходы первичного и эталонного контуров
Как видно из рисунка, графики полностью совпадают.
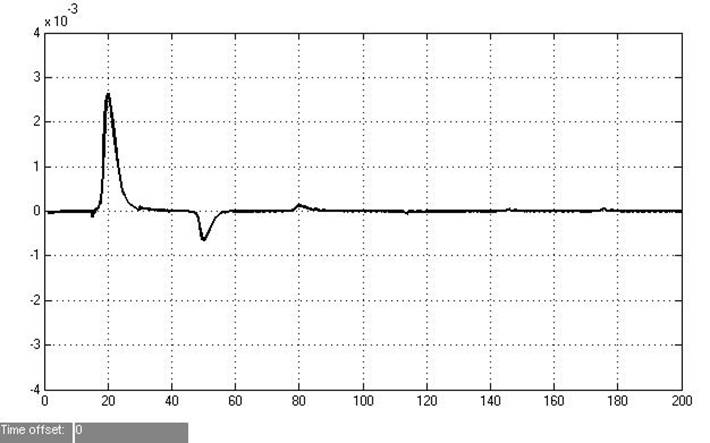
Рис.5.4.2. Рассогласование эталона и реальной системы
После введения пропорциональной составляющей величина ошибки уменьшилась и график стал сходится к 0 гораздо быстрее (100 с.)
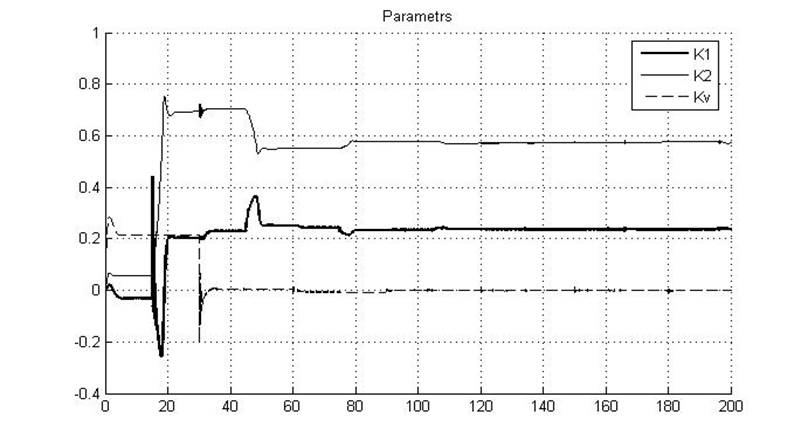
Рис.5.4.3. Графики параметров K1, K2 и Kv
Из рисунка видно, что параметр K1 (Kп) сходится к значению 0.23, а параметр K2 (Kд) – к значению 0.57.
5.5 Добавление дифференциального члена
![]()
Как и в пункте 5.2 исследование будем производить при при наличии структурной помехи, т.е. a0 = 2.
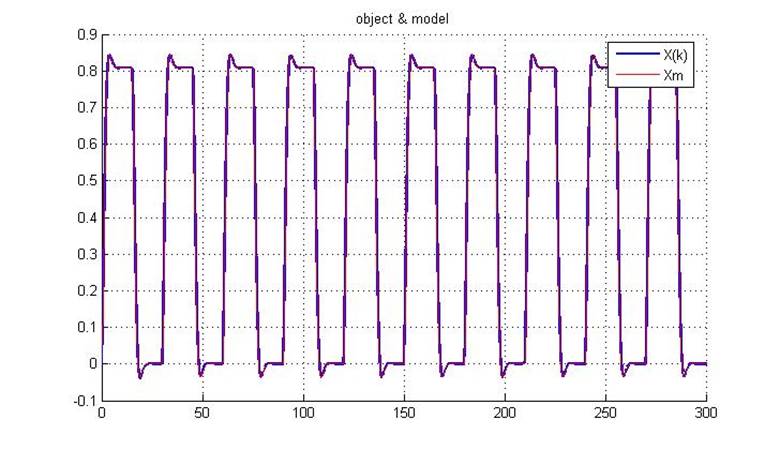
Рис.5.5.1. Выходы первичного и эталонного контуров
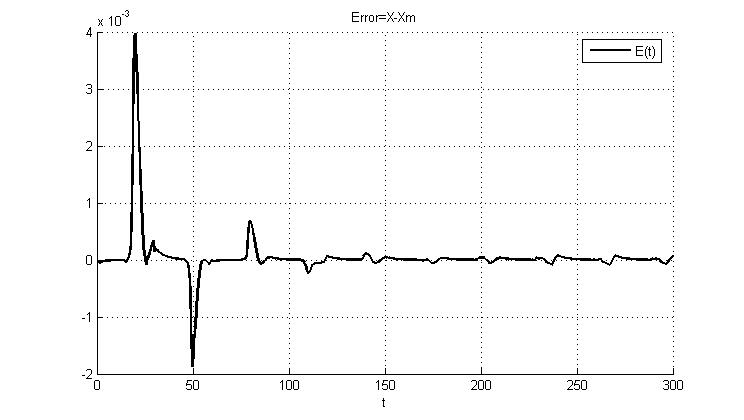
Рис.5.5.2. Рассогласование эталона и реальной системы
После введения дифференциальной составляющей усилилось влияние помех, значение выбросов ошибки увеличилось. Эти небольшие выбросы заметны и после 300 с. Однако, сходимость ошибки, по сравнению с п.5.2 улучшилась.
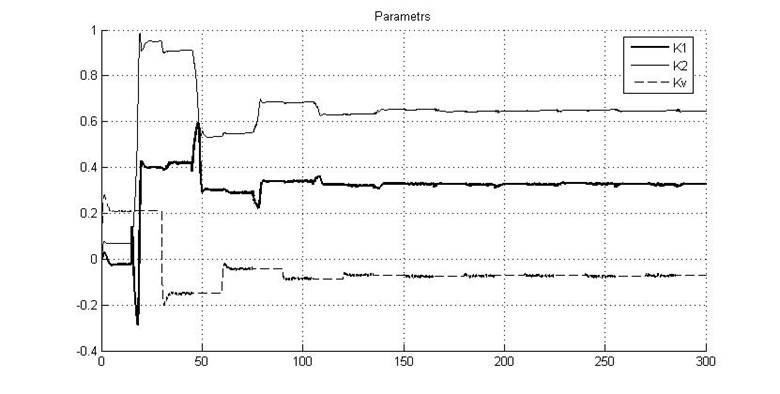
Рис.5.5.3. Графики параметров K1, K2 и Kv
Из рисунка видно, что параметр K1 (Kп) сходится к значению 0.34, а параметр K2 (Kд) – к значению 0.63.
6. Выводы
В ходе выполнения данной работы была исследована беспоисковая адаптивная система с эталонной моделью, построенная на основе метода скоростного градиента. Можно утверждать, что система оказалась работоспособной, т.к. во время работы она производит коррекцию коэффициентов регулятора и подстройку выходов основного контура относительно эталонного, что можно наблюдать на примере затухающего характера ошибки по x.
При введении даже структурных помех ошибка по x и время подстройки увеличивались.
Введение в систему пропорционального члена приводит к значительному уменьшению величины колебаний ошибки и, как видно из графика, уменьшению времени подстройки.
При введении дифференциального члена наблюдается увеличение быстродействия системы, но усиливается влияние даже малых по величине помех.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.