
















Введение
Сегодня нас окружает множество электронных устройств. Мы сталкиваемся с ними в повседневной жизни. Узнаём время по электронным часам, дети играют в видео игры, говорим по мобильным телефонам, пользуемся множеством других электронных устройств.
Все эти устройства могут выполнять некие сложные операции самостоятельно, в соответствии с заложенной программой, без вмешательства человека. Устройства, руководящие их работой называются контроллерами. Они способны воспринимать некие внешние сигналы от устройства ввода, перерабатывать эти данные и выдавать сигналы на исполнительные внешние устройства. Здесь они, по сути, схожи с примитивными животными (медузы, актинии), нервная система которых действует по тому же принципу: приняв внешнее воздействие – выполнит соответствующее действие.
В большинстве случаев достаточно ЭВМ на простом, не очень мощном процессоре. Знания, полученные при разработке микропроцессорной системы в курсовой работе, необходимы не только для узкого круга специалистов, занимающихся только разработкой компьютеров. Эти знания необходимы любому инженеру, работающему с микропроцессорной системой. Они необходимы для четкого понимания принципов работы любого компьютера, что поможет при необходимости найти и исправить возможные неполадки, усовершенствовать используемую систему, разработать новую. Знание внутренней организации ЭВМ необходимо для написания программ, напрямую работающих с аппаратными средствами микропроцессорных систем. Схема, разрабатываемая в данной курсовой работе, выполняет вполне практическую функцию сбора и обработки информации и содержит все функциональные блоки любого компьютера. Подобные системы применяются практически везде: определение давления в камере автомобиля, поддержание необходимых условий при проведении технологического цикла и т. д. Основным достоинством микропроцессора, применяемого в данной курсовой работе, является его дешевизна, что позволило ему широко распространиться во всех сферах народного хозяйства.
Контроллер, который разрабатывается в этой курсовой работе, должен обеспечивать:
– периодический опрос Р аналоговых датчиков и преобразование их сигналов с заданной точностью в цифровой код;
– обработку цифровых кодов с целью вычисления заданной функциональной зависимости Y(t) в реальном масштабе времени;
– отображение вычисленных значений функции Y(t) на дискретных индикаторах;
– преобразование цифровой функции в аналоговый сигнал y(t).
Номер варианта 8;
Количество аналоговых датчиков, Р 10;
Максимальное напряжение на выходе датчиков, Umax 10 В;
Требуемый период коммутации датчиков, Т 870 мкс;
Требуемая точность преобразования, d 0,05;
Разрешённые номера портов ввода/вывода, <V> 48 – 63;
Функция Y(t) = N(1)/1 + N(2)/2+…+N(P)/P.
1 Разработка аппаратной части
1.1 Обоснование структурной схемы контроллера
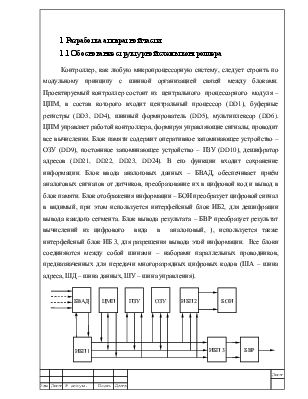
Контроллер, как любую микропроцессорную систему, следует строить по модульному принципу с шинной организацией связей между блоками. Проектируемый контроллер состоит из центрального процессорного модуля – ЦПМ, в состав которого входит центральный процессор (DD1), буферные регистры (DD3, DD4), шинный формирователь (DD5), мультиплексор (DD6). ЦПМ управляет работой контроллера, формируя управляющие сигналы, проводит все вычисления. Блок памяти содержит оперативное запоминающее устройство – ОЗУ (DD9), постоянное запоминающее устройство – ПЗУ (DD10), дешифратор адресов (DD21, DD22, DD23, DD24). В его функции входит сохранение информации. Блок ввода аналоговых данных – БВАД, обеспечивает приём аналоговых сигналов от датчиков, преобразование их в цифровой код и вывод в блок памяти. Блок отображения информации – БОИ преобразует цифровой сигнал в видимый, при этом используется интерфейсный блок ИБ2, для дешифрации вывода каждого сегмента. Блок вывода результата – БВР преобразует результат вычислений из цифрового вида в аналоговый, ), используется также интерфейсный блок ИБ 3, для разрешения вывода этой информации. Все блоки соединяются между собой шинами – наборами параллельных проводников, предназначенных для передачи многоразрядных цифровых кодов (ША – шина адреса, ШД – шина данных, ШУ – шина управления).
 |
Рисунок 1 – Структурная схема проектируемого контроллера.
1.2 Центральный процессорный модуль
Центральный процессорный модуль является центральным блоком контроллера. Он обеспечивает управление и синхронизацию работы всего устройства, обеспечивает приём, выдачу, хранение и обработку данных.
Этот контроллер будет исполнен на базе микропроцессора КР1821ВМ85А с использованием различных блоков и устройств на базе 580-й серии или других – полностью совместимых с этой серией микросхемах. Использование данного процессора вместо КР580ВМ80А обусловлено
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.