








Министерство Общего и специального образования Российской Федерации
Санкт-Петербургский Государственный Технологический Университет Растительных Полимеров
Кафедра автоматизированного электропривода и электротехники
Синтез автоматической системы подчинённого регулирования
|
Выполнил: |
Студент группы № 533 |
В. |
|
|
Проверил: |
К.Т.Н.,доцент |
|
Санкт – Петербург
2000
Автоматизированным электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
ПО виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движение.
По степени управляемости электропривод может быть:
1)нерегулируемый-для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих действий;
2)регулируемый-для сообщения изменяемой или неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3)программно-управляемый-управляемый в соответствии с заданной программой;
4)следящий-автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5)адаптивный-автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По уровню автоматизации можно различить:
1-автоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п..
2-автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3-автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
По роду тока применяются электроприводы постоянного и переменного тока.
Одним из подходов к построению систем автоматического регулирования является оптимальное управление, состоящее в минимизации некоторого заранее выбранного функционала качества. Этот способ управления позволяет получить оптимальные в том или ином отношении характеристики системы.
Недостатком системы подчиненного регулирования является ее малое быстродействие потому, что каждый внешний контур должен обладать меньшим быстродействием, чем внутренний для возможности настройки самой системы. Если внутренний контур является не скорректированным должным образом, то он передаст отрицательные свойства тому контуру, к которому он подчинен. Вследствие этого будет происходить нарастание ошибки, и на выходе можно получить неверный результат. Таким образом, настройку и расчет всей системы начинаем с настройки внутреннего контура.
Данный контур настраиваем на модульный оптимум. Для этого должны быть обеспечены следующие требования:
1)значение установившейся ошибки системы должно быть равно нулю;
2)качество системы должно быть наилучшим, т. е. перерегулирование - минимальным: порядка 4,2%-4,3%;
3)должно быть обеспечено наибольшее быстродействие, т.е. время переходного процесса должно быть минимальным;
Модульный оптимум дает астатизм первого порядка, т. е. если задание постоянное, то и установившаяся ошибка будет постоянная, но если задание изменяется во времени, то ошибка будет статическая.
Для настройки системы на симметричный оптимум необходимо повысить порядок астатизма системы.
Для контура, настроенного на симметричный оптимум перерегулирование будет порядка 43%, что в 10 раз больше перерегулирования при настройке на модульный оптимум, но в данном случае запас по фазе около 40 (град.), а для модульного оптимума около 63 (град.).
В качестве модели системы автоматического регулирования используем двухконтурную систему подчиненного регулирования.
Достоинства систем подчиненного регулирования: относительная простота, унификация настроек регуляторов, достаточно высокое качество динамики за счет компенсации основных инерционностей объекта, простота ограничения регулируемых координат и др..
M
W
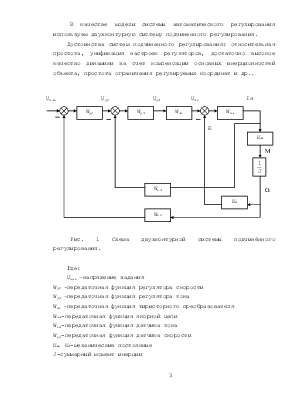
Рис. 1 Схема двухконтурной системы подчинённого регулирования.
Где:
Uзад –напряжение задания
Wрс –передаточная функция регулятора скорости
Wрт –передаточная функция регулятора тока
Wтп –передаточная функция тиристорного преобразователя
Wяц-передаточная функция якорной цепи
Wдт-передаточная функция датчика тока
Wдс-передаточная функция датчика скорости
Км, Ке-механические постоянные
J-суммарный момент инерции
Данные для расчета:
Та=0.02 с;
Тдт=0.01 с;
Тдс=0.015 с;
Ттп=0.007 с;
РN=2000 Вт;
UN=220 В;
nN=3000 об/мин;
КПДдв=0.85;
J=1.1
Рассчитаем основные параметры двигателя:
![]() А
А
![]() Вт
Вт
![]() ОМ
ОМ
![]()
![]() рад/с
рад/с
![]()
![]() .Настройка контура
тока на модульный оптимум.
.Настройка контура
тока на модульный оптимум.
 Для определения
передаточных функций входящих в контур тока рассмотрим систему:
Для определения
передаточных функций входящих в контур тока рассмотрим систему:
 |
|||||||
 |
|||||||
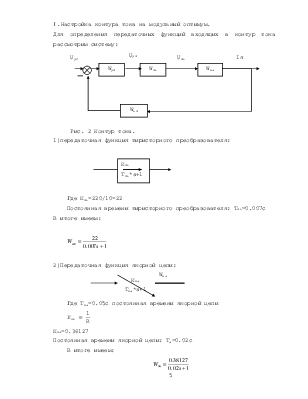
Рис. 2 Контур тока.
1)передаточная функция тиристорного преобразователя:
 |
Где Ктп=220/10=22
Постоянная времени тиристорного преобразователя: Ттп=0.007с
В итоге имеем:
![]()
2)Передаточная функция якорной цепи:
|
Где Тяц=0.05с постоянная времени якорной цепи
![]()
Кяц=0.38127
Постоянная времени якорной цепи: Та=0.02с
В итоге имеем:
![]()
3)Передаточная функция датчика тока:
|
![]()
![]()
![]()
Где постоянная времени датчика тока Тдт=0.01с
![]()
Кт=0.9346
В
итоге: ![]()
4)Определим передаточную функцию регулятора тока:
|
Для упрощения расчета параметров регулятора тока несколько преобразуем схему контура тока, представив его схему с отрицательной единичной обратной связью. В прямом канале помимо звена регулятора тока должны находиться два апериодических звена первого порядка. Структурная схема должна содержать одно апериодическое звено с большой постоянной времени, а другое – с малой постоянной времени. Звеном с большой постоянной времени является звено Wяц, а звеньями
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.