Билет 10
1. Способы регулирования частоты вращения ЭД постоянного тока независимого возбуждения.
Когда по технологии или по каким–либо иным причинам надо полечить новое значение скорости, то это достигается за счёт изменения характеристики двигателя, т.е. за счёт получения новой искусственной хар-ки.
Статическая характеристика линейна, но при недокомпенсации реакции якоря и наличии остаточного потока х-ки могут иметь вид:
![]()
![]()
Для получения искусственной характеристики можно:
1) изменить напряжение на якорной цепи;
2) ввести Rдоб в цепь якоря;
3)изменить магнитный поток.
1)U=var регулирование данным способом разрешается только при пониженном напряжении.При этом уменьшается скорость идеального ХХ.

Реализуется данный способ как в разомкнутых, так и в замкнутых системах, при питании якорной цепи от управляемых преобразователей т.к: генератор постоянного тока, ТП, ШИП,ТП с уменьшением напряжения D<=10
2)Регулирование введением Rдоб=var.
 |
Rя=Rяд=Rдоб; ![]() ;
;
С увеличением R увеличивается как абсолютное отклонение скорости так и отновительное,те статизм, существенным недостатком является энергетика.
U=(kФ*w+Iя*(Rяд+Rдоб)*)Iя
U(Iя)=kФ*w Iя +Iя*(Rяд+Rдоб)*Iя
P1=M*w+ΔP
ΔP-переменные потери в якорной цепи и в добавленном сопротивлении.
При регулировании при постоянном моменте Мс:
Исходя из этого диапозон регулирования
скорости: D<=3..6.
3)Искусственная характеристика при изменении магнитного потока
Так как Фном близок к потоку насыщения, то увеличение потока требует значительного увеличения тока возбуждения, что резко увеличивает потери в меди=>регулирование осуществляется за счёт уменьшения потока. При этом скорость ХХ возрастает, возрастаети угловой коэффициент (Rяд/(кФ*кФ)),жесткость характеристики уменьшается изменение статизма (как правило увеличение) зависит от параметров двигателя.
Iкз=U/Rяд=const;
Mкз=кФ*Iкз
С уменьшением потока
основных полюсов усиливается действие реакции якоря и для сохранения допустимого искажения
поля необходимо соответствующее снижение максимального тока 
![]()
С уменьшением магнитного потока потери в стали снижаются, а механические потери с увеличением скорости несколько увеличиваются.
В первом приближении можно считать что постоянные потери практически неизменны т.е. допустимая нагрузка по нагреву тоже определяется намагничивающим током.
Iдоп=Iном=сonst.
Тогда допустимый момент уменьшается, а допустимая мощность остаётся неизменной:
 |
 |
||
4.Автоматическое регулирование.
За счёт действий системы автоматического регулирования ход получения новых искусственных характеристик ставится в зависимость от изменений каких-либо переменных без участия оператора. Например с система с отр. ОС по скорости. За счёт САР удаётся получить жёсткую механическую характеристику
 |
2. Регулирование скорости в системе ПЧ-АД.
 Преобразователи частоты выполняются как на
электромашинных агрегатах, так и статическими. В первом случае используют синх.
или асинх. генератор.
Преобразователи частоты выполняются как на
электромашинных агрегатах, так и статическими. В первом случае используют синх.
или асинх. генератор.
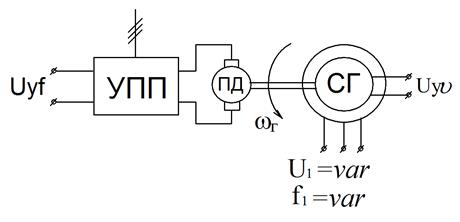
УПП-управл. преобр. пост. тока. ПД-приводной ЭД.
УПП спом. ПД обеспеч. регулирование скорости СГ и выходной частоты f1. Управление выходным напряжением U1 осуществляется по цепи возбужд. цепи генер.
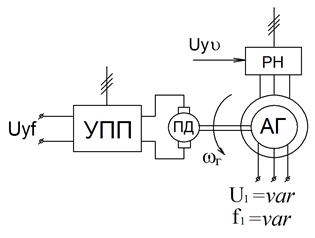 Т.к. ЭДС в роторной цепи является функцией скольжения
и напряжения не статоре, то для получения заданного закона частотного
регулирования может потребоватся регулятор переменного напряжения РН . В этих
системах присутствует большое кол-во ступеней преобразования энергии – т.е.
низкий КПД, большая инерционность , но гладкая форма выходного напряж.
Т.к. ЭДС в роторной цепи является функцией скольжения
и напряжения не статоре, то для получения заданного закона частотного
регулирования может потребоватся регулятор переменного напряжения РН . В этих
системах присутствует большое кол-во ступеней преобразования энергии – т.е.
низкий КПД, большая инерционность , но гладкая форма выходного напряж.
Статич. преобразователи в зависимости от требований выполняются в виде источника напряжений или тока. При частотном регулировании обеспечивается необходимая жесткость статич. хар. и критический момент. При частотно-токовом регулир. обеспеч. регулир. момента в динамичю процццесах.
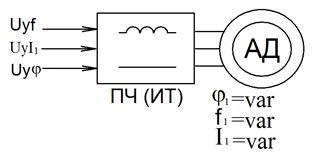
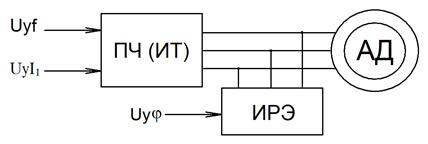
Uуф-управляющее напряжение тока и его фазы.
ИРЭ-регулируемый ист. реакт. энергии.
Если нагрузка Мс меняется , меняется ток ротора , то должна менятся не только величина но и фаза тока статора для сохр. потокосцепления ротора. Для получения управляющих напряжений Uуf Uyi Uyф используют нелинейные звенья так называемые функциональные преобразователи.
Законы частотного регулирования.
 ,
, Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


