






Билет №14.
Вопрос №1 способы регулирования скорости АД с фазным ротором.
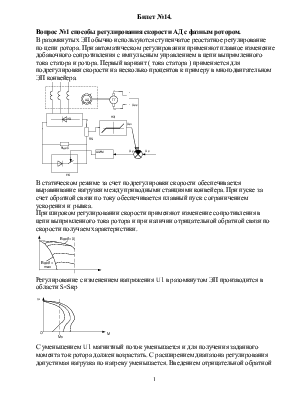
В разомкнутых ЭП обычно используются ступенчатое реостатное регулирование по цепи ротора. При автоматическом регулировании применяют плавное изменение добавочного сопротивления с импульсным управлением в цепи выпрямленного тока статора и ротора. Первый вариант ( тока статора ) применяется для подрегулировки скорости на несколько процентов к примеру в многодвигательном ЭП конвейера.
В статическом режиме за счет подрегулировки скорости обеспечивается выравнивание нагрузки между приводными станциями конвейера. При пуске за счет обратной связи по току обеспечивается плавный пуск с ограничением ускорения и рывка.
При широком регулировании скорости применяют изменение сопротивления в цепи выпрямленного тока ротора и при наличии отрицательной обратной связи по скорости получаем характеристики.
Регулирование с изменением напряжения U1 в разомкнутом ЭП производится в области S<Sкр
С уменьшением U1 магнитный поток уменьшается и для получения заданного момента ток ротора должен возрастать. С расширением диапазона регулирования допустимая нагрузка по нагреву уменьшается. Введением отрицательной обратной связи по скорости позволяет получать S>Sкр но работа в этой области допускается кратковременная из-за существенного увеличения потерь энергии. Наиболее целесообразен данный способ для машин с вентиляторной нагрузкой и для механизмов с постоянным статическим моментом Mc=const, работающими с частыми включениями при использовании отрицательной обратной связи по току для ограничения пусковых потерь и обеспечения плавного пуска.
В подъемно-транспортных механизмах необходимо обеспечивать пуск и
торможение с заданными значениями ускорения и рывка ( ), а также снижение скорости перед
остановкой для точного позиционирования в этом случае эффективным может быть
использование НПЧ, который позволяет
осуществлять рекуперацию энергии, а также регулировать напряжение и скорость на
малых частотах.
), а также снижение скорости перед
остановкой для точного позиционирования в этом случае эффективным может быть
использование НПЧ, который позволяет
осуществлять рекуперацию энергии, а также регулировать напряжение и скорость на
малых частотах.
Реостатное регулирование скорости АД.
Эквивалентное сопротивление, вводимое в цепь ротора по схеме замещения равно половине сопротивления цепи постоянного тока. Роль регулятора выполняет ШИМ с промежуточным усилители на выходе.
ШИМ вместе с УК представляют с ШИП сопротивления. Работа ключа
характеризуется скважностью замкнутого состояния.  Т0
– период коммутации ключа. Для модуляции в ШИМ используется линейные
обратные напряжения (пилообразные или треугольные).
Т0
– период коммутации ключа. Для модуляции в ШИМ используется линейные
обратные напряжения (пилообразные или треугольные).
 ,
,  ,
,
![]() ,
,  .
.
Сопротивление, вводимое в цепь ротора
 (1)
(1)
уравнение механической характеристики
 (2)
(2)
зависимость критического скольжения от сопротивления пропорциональная
 (3).
(3).
Решая совместно (1), (2),(3), можно получить выражение для механической характеристики замкнутой системы, но использовать его для определения коэффициентов передачи обратной связи и регулятора на входе ШИМ неудобно из-за произведения переменных.
Поэтому эти значения определяют графическим способом.
1.строят характеристики ЭД для разомкнутого ЭП задаваясь UУ =0…Uоп.max определяя Rэ :
 - характеристики
- характеристики
2. по требуемым значениям погрешности скорости или статизму характеристики строят желаемую характеристику замкнутой системы (линия 1).
3. По двум точкам линия характеристики замкнутой системы и характер ЭД составляют систему уравнений.
В точке 1 ![]()
В точке 2 ![]()
Из системы определяют Uзс1 и kос . при отсутствии тахогенератора можно использовать положительную обратную связь по току (т.е. компенсацию возмущения), однако при этом ухудшается точность регулирования и динамические показатели.
2. Методика наладки и проверки систем фазового управления ЭП постоянного тока.
2.Метод наладки ипрверки СИФУ ЭП постоян тока
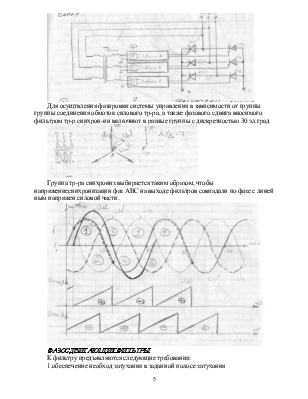
СИФУ-система импульсно фазового управления.СУ обеспечивает формирование по вертикольному принципу синхронизированной с сетью m-фазной последовательности упровляемых импульсов подаваемых в цепь управления тир-ми. Кроме того СУ изменяет фазу этих импульсов в соответ с напряжением управления поступающих из систем регулирования в дополнение к этим функциям. сист управл реверсивными преобраз осущ их раздельное управление , переключая управляющие импульсы с одного камплекта вентелей на другой при изменении направления выпрямленного тока.СУ рассмотрим на примере 3ф мостового реверсивного с раздел-м управлннием:
Основные элементы СУ
1.Тр-р синхронизации
2.Сглаживающий фмльтр (фазосдвигающий фильтр)
3.Устроуство ограничения углов управления min,max.
4.Канал фазового управления
5.Усилитель импульсов
6.Устройство логики
7.Датчик проводимости вентелей
Выделяют 2 группы требований предъяв к СУ.Первая группа относится к выходным устр-м.И определяет параметры управляющих импульсов исходя из надежности включен тиристоров в той или иной схеме .Кроме того сюда можно отнести четность открывания тирист-ов которая
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.