


1. Принципы построения схемы, хар. неревер-х ТП из переменного тока в постоянный.
Все схемы делятся на нулевые (однотактные) и мостовые (двухтактные). В нулевой схеме нагрузка подключается к нулевой точке трансформатора. Мостовая схема эквивалентна последовательному соединению двух нулевых схем (анодной и катодной). При параллельном соединении мостовых схем применяют уравнительные реакторы, которые служат для выравнивания мгновенных значений напряжений.
Схемы нашедшие большие применение в ЭП.
1.
 Однофазная
мостовая
Однофазная
мостовая
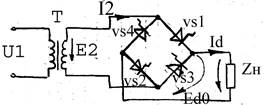
- для RL нагрузки
- для R нагрузки
Применяется в ЭП небольшой мощности 5кВт, редко 7,5кВт и для питания обмоток возбуждения ЭМ большой мощности.
2.
 Трёхфазная нулевая
Трёхфазная нулевая
- для R нагрузки
- для RL нагрузки
Данная схема самая простая из трёхфазных. Однако эта схема имеет большой уровень пульсаций, их частота равна 3fсети=150Гц. В этой схеме выпрямленный ток нагрузки протекает через транс-тор вызывает его дополнительное подмагничивание. В связи с этим тр-р должен выбираться с запасом по сечению магнитопровода. Завышенные габариты из-за одностороннего подмагничивания обусловл. его применение для ЭП 1-10кВт.
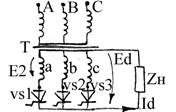
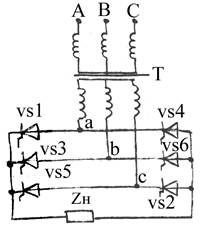
3. Сдвоенная трёхфазная нулевая с уравнительным реактором
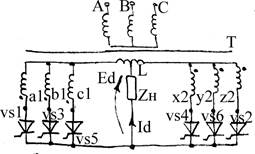
 В
данной схеме вент. группы (ВГ) vs1, vs3, vs5 и vs4, vs6, vs2 работают параллельно. Поэтому внутр. сопр-е
такого преобразователя будет минимальным. Уравнительный реактор L исключает коммутацию вентилей с одной группы на вентили другой группы.
Тем самым делают работу группы независимой друг от друга. В схеме отсутствует
подмагничив. тр-ра током нагрузки т.к. направление МДС двух обмоток
противоположны. Частота пульсаций равна 6fсети=300Гц. Эта схема целесообразна для ТП большой мощности с большими
токами нагрузки. Недостатки: наличие дополнительного элемента – уравнительного
реактора; и наличие тр-ра с двумя вторичными обмотками.
В
данной схеме вент. группы (ВГ) vs1, vs3, vs5 и vs4, vs6, vs2 работают параллельно. Поэтому внутр. сопр-е
такого преобразователя будет минимальным. Уравнительный реактор L исключает коммутацию вентилей с одной группы на вентили другой группы.
Тем самым делают работу группы независимой друг от друга. В схеме отсутствует
подмагничив. тр-ра током нагрузки т.к. направление МДС двух обмоток
противоположны. Частота пульсаций равна 6fсети=300Гц. Эта схема целесообразна для ТП большой мощности с большими
токами нагрузки. Недостатки: наличие дополнительного элемента – уравнительного
реактора; и наличие тр-ра с двумя вторичными обмотками.
4. Трёхфазная мостовая схема
 Преимущества мостовой по сравнению с нулевой:
Преимущества мостовой по сравнению с нулевой:
 Пульсации
выпрямленной ЭДС в два раза больше по частоте и меньше по амплитуде.
Пульсации
выпрямленной ЭДС в два раза больше по частоте и меньше по амплитуде.Прим-ся эта схема в ЭП в десятки и сотни кВт. Для наг-к с большим током ТП комплектуется из нескольких параллельно соединённых мостов.
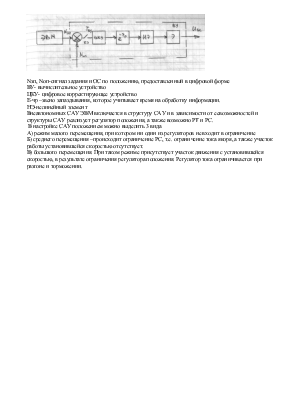
2. Принципиальная схема САУ положением ЭП постоянного тока.
Системы автоматического управления положением механизма.
Как правило в наст. Время САУ положением строятся по принципу подчиненного регулирования, т.е. ко внутренним контурам регулирования тока и скорости добавляется внешний контур регулирования положения. По принципу действия они могут быть как аналоговые так и цифровые. Для аналоговых систем в качестве устройства измерения положения применяют сельсины включенные по схеме трансформаторного режима.
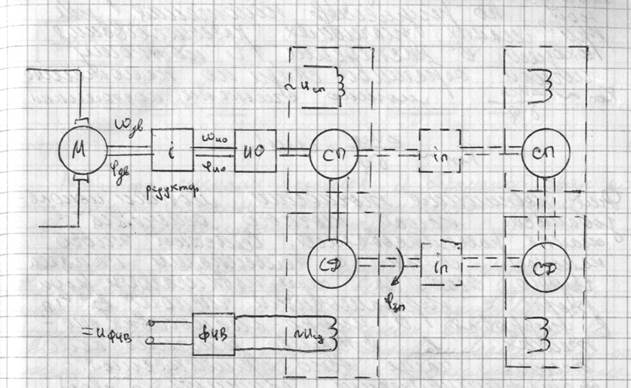
Сельсин-приемник (СП) связан с валом исполнительного органа (ИО). Сельсин-датчик при повороте ротора на угол φзп относительно согласованного положения с ротором СП, задает управляющий сигнал. Выходной сигнал однофазной обмотки переменного тока СД Uсд определяется величиной рассогласования δφ=φзп-φ, где φ-угол поворота вала ИО. Фаза напряжения Uсд относительно напряжения Uоп=Uсп на однофазной обмотке СП зависит от знака рассогласования, которому переменное Uсд выпрямляется фазочувствительным выпрямителем ФЧВ и полярность напряжения на его выходе Uфчв соответствует знаку рассогласования. Зависимость Uсд(δφ) является синусоидальной, но регулятор положения уже при малых значениях рассогласования входит в насыщение, и поэтому сигнал обратной связи по положению Коп=∆Uсд/δφ можно считать постоянным. Для повышения точности можно использовать канал точного отсчета малых рассогласований. Сельсин этого канала связан с сельсином канала грубого отсчета через редуктор с передаточным числом iп. В цифровых и цифро-аналоговых системах в качестве датчика положения чаще всего применяют фотоэлектрические датчики.
Различают автономные и неавтономные САУ положением. Первый вид системы применяют когда САУ находится под управлением ЭВМ.
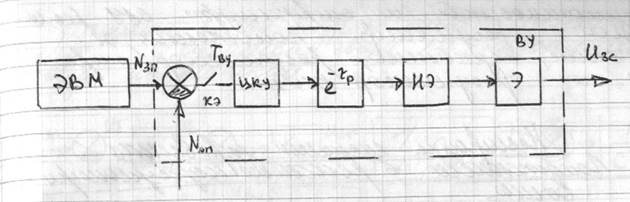
Nзп, Nоп-сигнал задания и ОС по положению, предоставленный в цифровой форме
ВУ- вычислительное устройство
ЦКУ- цифровое корректирующее устройство
Е-чр –звено запаздывания, которое учитывает время на обработку информации.
НЭ-нелинейный элемент
Внеавтономных САУ ЭВМ включается в структуру САУ и в зависимости от еевозможностей и структуры САУ реализует регулятор положения, а также возможно РТ и РС.
В настройке САУ положением можно выделить 3 вида
А) режим малого перемещения, при котором ни один из регуляторов не входит в ограничение
Б) среднего перемещения –происходит ограничение РС, т.е. ограничение тока якоря, а также участок работы установившейся скоростью отсутствует.
В) большого перемещения. При таком режиме присутствует участок движения с установившейся скоростью, в результате ограничения регулятора положения. Регулятор тока ограничивается при разгоне и торможении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.