Билет №5
1. Системы программного управления, принципы построения , назначение.
Системы программного управления решают задачу обеспечения высокой точности перемещенией РО за определенное время. Величина перемещений варьируется в достаточно широких пределах, однако для реальной системы обычно исходят из некоторого базового перемещения Sδ , которое может быть выбрано как наиболее вероятное или характерное для ответственных операций, осуществляемых с помощью данного РО. Важным показателем позиционной системы является относительная точность δ0=Δ/ Sδ , где Δ- разрешающая способность системы, т.е минимальное перемещение, которое может быть измерено используемым в системе датчиком ОС.
В позиционных системах с дискретным датчиком ОС (ДОС)
повышение относительной точности требует соответствующего увеличения числа
разрядов цифровой части системы. При использовании аналоговых (фазовых) ДОС
повышение относительной точности достигается применением многоотсчетных систем,
в частности большое распространение получили 2-х отсчетные системы,
представляющие собой сочитание системы грубого и точного отсчета. Система
грубого отсчёта управляет движением при больших перемещениях Sδ,гр
с низкой разрешающей способностью Δгр. Вблизи заданного положения РО, когда
оставшаяся часть пути становится равной Sδ.точ управление
передается точной системе с разрешающей способностью Δточ.
При этом относительная
точность обеих систем обычно равна: 
Позиционная система характеризуется также базовой скоростью перемещения Vδ.
Vδ= Sδ/tδ , где tδ – время, затрачиваемое на осуществление базового перемещения. В современных позиционных системах металлорежущих станков с разрешающей способностью порядка Δ=1мкм требуемая базовая скорость составляет 0.1-0.2 м/с.
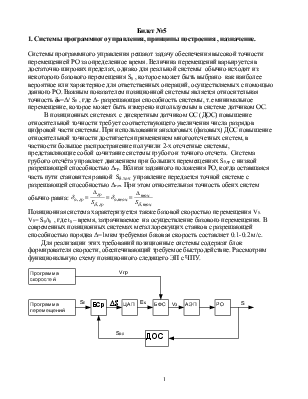
Для реализации этих требований позиционные системы содержат блок формирователя скорости, обеспечивающий требуемое быстродействие. Рассмотрим функциональную схему позиционного следящего ЭП с ЧПУ.
Задаваемые программой перемещения SE сравниваются в блоке сравнения БСр с сигналом обратной связи Sос. Сигнал рассогласования ΔS преобразуется ЦАП в аналоговый сигнал Es, поступающий на вход блока формирователя скоростей БФС.
На второй вход БФС подается сигнал от программы скоростей Vпр. БФС вырабатывает сигнал задания скорости Vз, который управляет АЭП, прводит в движения РО. Для управления позиционной системой существенное значение имеет выбор фазовой траектории процесса замедления при подходе к заданному положению РО.
Фазовая траектория отработки заданного перемещения (рис а) при пропорциональном управлении скоростью и рис.б. - при параболическом.
Простейшая фазовая траектория имеет вид прямой линии, она соответствует изменению скорости РО пропорционально отклонению ΔS от заданного положения.
V=-K*ΔS; V=dΔS/dt
Диф. урав-ние, соответствующее такой фазовой траектории имеет вид:
dΔS/dt +k*ΔS =0
Из последнего уравнения следует:
 , где ΔS,V0,a – значения рассогласования скорости, рассогласования
ускорения в момент t=0, К – коэфф. Усиления следящего ЭП по скорости.
, где ΔS,V0,a – значения рассогласования скорости, рассогласования
ускорения в момент t=0, К – коэфф. Усиления следящего ЭП по скорости.
При пропорциональном управлении скоростью длительность обработки заданного перемещения стремится ???? к бесконечности, так как при подходе к заданному положению V и а стремятся к нулю. Снижение скорости от начального значения V0 до некоторого значения Vk при этом способе управления происходит за время:
Для повышения быстродействия позиционной системы используется управление с постоянным значением ускорения а. В этом случае реализуется параболический закон изменения скорости в финкции рассогласования.
![]() При параболическом законе с уменьшением ΔS необходимо
увеличивать
При параболическом законе с уменьшением ΔS необходимо
увеличивать
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.