



Билет №8
1. Настройка типового регулятора скорости одноконтурной САУ скоростью электроприводов постоянного тока
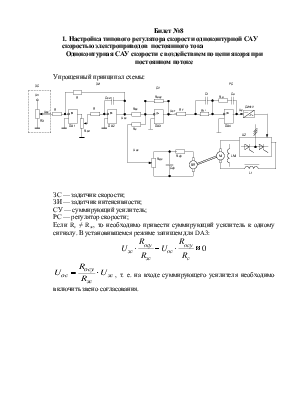
Одноконтурная САУ скорости с воздействием по цепи якоря при постоянном потоке
Упрощенный принципал схемы:

ЗС — задатчик скорости;
ЗИ — задатчик интенсивности;
СУ — суммирующий усилитель;
РС — регулятор скорости;
Если Rс ≠ Rзс, то необходимо привести суммирующий усилитель к одному сигналу. В установившемся режиме запишем для DA3:
 , т. е. на входе суммирующего
усилителя необходимо включить звено согласования.
, т. е. на входе суммирующего
усилителя необходимо включить звено согласования.
Зная коэффициент передачи ОС  и задавшись υзадания
соответствующего ωном., υзсн , можно выбрать
номиналы Rc Rpc
и задавшись υзадания
соответствующего ωном., υзсн , можно выбрать
номиналы Rc Rpc  /
/
Силовую часть будем представлять для режима непрерывного тока. Поскольку поток постоянен, введем обозначение С = КФН.
Если пренебречь Т э магнитной ТГ(ВR), то  .
.
А.
Рассмотрим соотношение для настройки регулятора ТМ > 4ТЯ.
Передаточную функцию ЭД можно представить:
 , где Тд1 и Тд2 определяются
корнем хар-ного уравнения:
, где Тд1 и Тд2 определяются
корнем хар-ного уравнения: ![]() , причем Тд1
> Тд2.
, причем Тд1
> Тд2.
При оптимизации контура на ТО необходим ПНД регулятор с передаточной функцией
 , ТРС1
= Тд1; Трс2 = Тд2;
, ТРС1
= Тд1; Трс2 = Тд2;
 , где Тμ = Тп + Тдс
+ εрс, либо по
уточненной формуле Ямпольского
, где Тμ = Тп + Тдс
+ εрс, либо по
уточненной формуле Ямпольского
 , обычно
необходимо для повышения немехочувствительности и исключения самовозбуждения
ОУ.
, обычно
необходимо для повышения немехочувствительности и исключения самовозбуждения
ОУ.
![]() В соответствии
со схемой регулятора
В соответствии
со схемой регулятора ![]() ;
; ![]()
 .
.
При указании выбора параметров передаточная функция контура

Процесс изменения скорости близок к стандартному. Чтобы произвести анализ по возмущению, запишем соответственную передаточную функцию

Таким образом контур соответствует контуру, настроенному на ТО, а периодич. Объектом регулирования и статич. ошибка по возмущению по моменту сопротивления отсутствуют, когда Тм > 10Тя.
Тд1 ≈ Тм , Тд2 ≈ Тя, и если Тд1 достаточно велика и п/п по возмущению недопустимо длительный, то при условии Тд1 > 4Тμ выбора параметров регулятора можно произвести следующим образом (близко к СО):
1.
При Тд2 > 4Тм; Трс1 = Тд2; Трс2
= 4Тμ  П/П будет тем ближе к стандарту,
чем больше соотношение Тд1 / 4Тμ.
П/П будет тем ближе к стандарту,
чем больше соотношение Тд1 / 4Тμ.
Б.
Тм < 4Тя. В этом случае хар-ное уравнение будет

 . При таком объекте регулирования
необходима передаточная функция регулятора
. При таком объекте регулирования
необходима передаточная функция регулятора  .
Реализовать такой регулятор в принципе можно, но в этом случае стараются
обойтись ПИД регулятором
.
Реализовать такой регулятор в принципе можно, но в этом случае стараются
обойтись ПИД регулятором ![]() . При этом
динамика будет тем ближе к стандартной, чем больше будет соотношение
. При этом
динамика будет тем ближе к стандартной, чем больше будет соотношение  , т. е. чем больше частота среза
контура
, т. е. чем больше частота среза
контура ![]() по отношению к резонансной частоте
колебат. звена
по отношению к резонансной частоте
колебат. звена ![]() .
.
В.
Если допустимо снижение быстродействия, то вместо ПИД регулятора можно использовать ПИ регулятор. При этом когда Тм > 4Тя =>Тд2 относят к малым постоянным времени, а при Тм < 4Тя синтез производят по частотным характеристикам.
При необходимости получить определенное значение ускорения на входе
контура используют задатчик интенсивности. Если υ, снимаемое с потенциометра Rзи
обозначить υзи, а постоянные времени интегратора на
усилителе DA2 — ![]() , то сигнал на выходе задатчика
будет изменяться по закону
, то сигнал на выходе задатчика
будет изменяться по закону  , таким образом
ускорение
, таким образом
ускорение  .
.
Недостатком рассмотренной системы является:
1. отсутствие ограничений тока;
2. нелинейность характеристик преобразователя влияет непосредственно на контур скорости;
3. низкое быстродействие П/П при изменении Uсети.
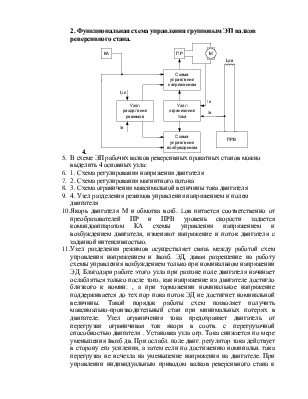
2. Функциональная схема управления групповым ЭП валков реверсивного стана.
4. 
5. В схеме ЭП рабочих валков реверсивных прокатных станов можно выделить 4 основных узла:
6. 1. Схема регулирования напряжения двигателя
7. 2. Схема регулирования магнитного потока
8. 3. Схема ограничения максимальной величины тока двигателя
9. 4. Узел разделения режимов управления напряжением и полем двигателя
10. Якорь двигателя М и обмотка возб. Lов питается соответственно от преобразователей ПР и ПРВ уровень
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.