Подставляя в решение уравнения значения времени, построим кривую М(t) до значения (рис. 9)
9. Окончательная проверка ЭД
Для окончательной проверки электродвигателя по нагреву и перегрузочной способности используются уточненная скоростная и нагрузочная диаграммы за весь цикл работы механизма. Порядок проверки аналогичен рассмотренному в разделе 5:
 , где
, где ![]() - время цикла с учетом
ухудшения условий охлаждения ЭД.
- время цикла с учетом
ухудшения условий охлаждения ЭД.
![]() - статический момент на i-ом
участке диаграммы.
- статический момент на i-ом
участке диаграммы.
Для наиболее точного расчета необходимо рассмотреть как можно больше участков диаграммы. Для этого воспользуемся программой MATLAB, которая произведет интегрирование на всем участке нагрузочной диаграммы.
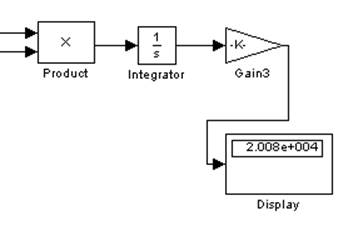
Рис. 15. Фрагмент документа MATLAB для расчета эквивалентного момента.
На рис. 15.
представлен документ MATLAB, который производит интегрирование. Блок Produkt производит возведение момента в квадрат, блок Integrator
производит интегрирование, блок Gain3 представляет собой величину ![]() , блок Display
выводит получившееся значение.
, блок Display
выводит получившееся значение.
В результате получим:
![]()
Приведем это значение к стандартному значению ПВ:

Электродвигатель проходит по нагреву.
Для проверки ЭД по перегрузочной способности определим на уточненной нагрузочной диаграмме максимальный момент:
![]()
ЭД подходит по перегрузочной способности.
Рассчитаем потери мощности по формуле:
 , где
, где ![]() - число участков цикла с
установившемся режимом;
- число участков цикла с
установившемся режимом;
![]() - установившееся значение
скорости i-го участка;
- установившееся значение
скорости i-го участка;
![]() - ток в якорной цепи в
установивщемся режиме на i-м участке;
- ток в якорной цепи в
установивщемся режиме на i-м участке;
![]() - сопротивление якорной цепи
самого двигателя;
- сопротивление якорной цепи
самого двигателя;
![]() - число участков переходных
режимов;
- число участков переходных
режимов;
![]() - скорость двигателя на i-ом
участке;
- скорость двигателя на i-ом
участке;
![]() - ток якоря в переходных
режимах;
- ток якоря в переходных
режимах;
![]() - постоянные потери.
- постоянные потери.
Расчет потерь произведем с помощью программы MATLAB.
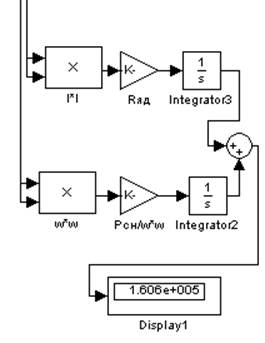
Рис. 16. Фрагмент документа MATLAB для расчета потерь мощности.
В
результате получаем: ![]()
10. Расчет энергетики ЭП
Рассчитаем расход энергии за цикл:
 , где tyi – время работы на i-ом участке в установившемся режиме;
, где tyi – время работы на i-ом участке в установившемся режиме;
ti – длительность i-ого участка переходного режима;
tр – время работы ЭП за цикл.
![]()
Расчет энергии произведем с помощью программы MATLAB.
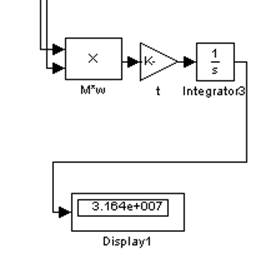
Рис. 17. Фрагмент документа MATLAB для расчета энергии за цикл.
В результате расчета
получим: ![]()
Потери энергии за цикл работы:

КПД электропривода за цикл работы:

7. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭП
Статические характеристики двигателя и механизма приведены на рис.7.1. По ним рассчитываются сопротивления реостата для ωном и ωmin при подъёме груза, спуске груза и при подъёме и спуске захвата.
11. СХЕМА УПРАВЛЕНИЯ ЭП
Для механизма подъёма крана, разрабатываемого в данном курсовом проекте, выбираем схему с кулачковым контроллером ПС.
Схема предусматривает ступенчатый пуск, торможение и регулирование скорости. Контроллер имеет по 4 фиксированные позиции в каждом из направлений и нулевое положение.
Данные переключения силовых цепей, необходимых для получения требуемых механических характеристик, определяется приведённой на схеме диаграммой замыкания контактов контроллера.
Выбираем контакторы МК2А с коммутирующим током 400А и коммутирующим напряжением 484 В. В качестве сопротивлений возьмём блок резисторов ЯС3.
ЛИТЕРАТУРА
1. Крановый электропривод: Справочник / А.Г. Яуре, Е.М. Певзнер. - М.: Энергоатомиздат, 1988г.
2. Драников В.Г., Звягин И.Е. «Автоматизированный электропривод подъёмно-транспортных машин», М. Высшая школа, 1973 г.
3. Соколов М.М. «Автоматизированный электропривод общепромышленных механизмов.
4. Расчёт грузоподъёмных и транспортирующих машин (Иванченко Ф., Бондарев В. С., и др. – Киев: Высшая школа, 1975 г.).
5. М/ук 2203 Практическое пособие к курсовому проектированию по дисциплине «Теория электропривода», ч. II.
6. М/ук 18.21. Практическое пособие к курсовому проектированию по дисциплине «Теория электропривода» ч.I.
СОДЕРЖАНИЕ
Введение ………………………………………………………………….. 3
1. Техническое описание механизма ……………………………………….5
2. Диаграмма скорости и нагрузки механизма …………………………….7
3. Выбор системы электропривода и предварительный выбор ЭД …...…10
4. Упрощённая нагрузочная диаграмма ЭД ……………………………….14
5. Проверка ЭД по нагреву и перегрузочной способности ……………....16
6. Выбор силового оборудования и расчёт параметров ЭП………………17
7. Статические характеристики ……………………………………………18
8. Анализ переходных процессов …………………………………………..19
9. Окончательная проверка ЭД ……………………………………………..28
10. Расчёт энергетики ЭП …………………..………………………………38
11. Схема управления ЭП …………………..………………………………40
Заключение ……………………………………………………………….41
Литература …………………………………..……………………………42
Министерство образования Республики Беларусь
Гомельский государственный технический университет им. П.О. Сухого
Факультет автоматизированных и информационных систем
Кафедра: « Автоматизированный электропривод»
Курсовой проект
по предмету: «Теория электропривода»
по теме: «Электропривод механизма подъёма мостового крана»
Исполнитель студент гр. ЭП-41
Руководитель
2004
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте был рассчитан электропривод механизма подъёма мостового крана. Найдены и рассчитаны основные его параметры. Момент статический приведённый к валу двигателя МΣпр = 3534 Н∙м. Для электропривода был выбран электродвигатель постоянного тока
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.