
















МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ имени П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
по расчётно-практической работе
по дисциплине «Системы управления электроприводами»
на тему: «Электропривод постоянного тока»
Исполнитель: студент группы ЭП-41
Руководитель: преподаватель, к.т.н.
Гомель 2009
Задание:
Механизм Рольганг
Мощность двигателя: Р = 43 кВт,
Рабочая скорость: nр = 240 об/мин,
Момент инерции: J = 1,4 кг∙м².
1. Выбор электродвигателя и расчет его параметров
Выбираю электродвигатель по номинальной мощности и частоте вращения. Исходя из вида рабочей машины, выбираю двигатель серии Д.
Выбранный двигатель: Д818
UН = 220 В,
PН = 106 кВт,
nН = 470 об/мин,
Iн = 415 А,
J = 27,5 кг∙м².
Таблица 1.1 – Обмоточные данные двигателя
|
Число активных проводников якоря N |
Число парал. ветвей якоря 2а |
Сопр. якоря и добавочн. полюсов, Ом |
Сопр. парал. обмотки, Ом |
Магнитный поток на полюс, 10-2 Вб |
|
505 |
8 |
0,0066 |
22 |
9,77 |
Рассчитываю недостающие параметры:
– индуктивность якоря

где: βК = 0,6 – коэффициент, учитывающий отсутствие компенсационной бмотки и для двигателей серии Д, рД = 2 – число пар полюсов двигателя,
ωН = 49,19 – номинальная угловая скорость вращения двигателя (рад/с);
 рад/с
рад/с
– конструктивная постоянная двигателя
где: N – число активных проводников якоря,
2а – число параллельных ветвей обмотки якоря;
– произведение конструктивной постоянной на номинальный магнитный поток (Вб)
![]()
– номинальный момент (Н·м)
![]()
Приводим сопротивление к рабочей температуре:
![]()
![]()
где: α – температурный коэффициент (для меди α = 3,9·10-3),
Δt – разница между допустимой температурой обмотки (для класса изоляции F- 1600С) и температурой, для которой приведено сопротивление в справочнике (200С)
![]()
2. Выбор комплектного электропривода. Выбор трансформатора. Расчет параметров якорной цепи двигателя
Выбор комплектного электропривода производим исходя из вида рабочей машины, для которой рассчитывается электропривод.
Выбор трансформатора производим по требуемым номинальным напряжению и току преобразователя.
Выбираем из справочника [3] ЭП.
КТЭ-500/220-132-1ВТ-УХЛ4
Комплектный тиристорный электропривод серии КТЭ. Iном = 500 А, Uном = 220 В. 1-однодвигательный без линейного контактора; 3-реверсивный с изменением полярности напряжения на якоре; 2-c трансформатором.
1-АСР скорости однозонная; В- наличие устройства питания обмотки возбуждения двигателя; Т-наличие питания обмотки возбуждения тахогенератора.
Выбираем из справочника трансформатор ТСЗП-160/0,7-У3
Таблица 2.1. – Справочные данные трансформатора
|
Номин. мощность, кВ*А |
Напр. сетевой обмотки, В |
Вентильная обм. |
Преобразователь |
Потери, Вт |
Uк % |
Iхх % |
|||
|
Напр. В |
Ток, А |
Напр. В |
Ток, А |
Рхх |
Ркз |
||||
|
143 |
380 |
202 |
408 |
230 |
500 |
795 |
2400 |
4,5 |
5,2 |
Для трансформатора рассчитываем параметры обмотки фазы, приведенные ко вторичной обмотке:
– полное сопротивление:

где uК – напряжение короткого замыкания,
U2НФ – номинальное фазное напряжение вторичной обмотки трансформатора,
I2 - номинальный ток вторичной обмотки трансформатора;
– активное сопротивление

где РКЗ – потери короткого замыкания (Вт);
– реактивное сопротивление (Ом) и индуктивность (Гн)
![]() ,
,

где: ωс = 2πfc – угловая скорость вращения напряжения сети (рад/с).
Расчет параметров якорной цепи двигателя производим по следующим формулам:
– активное сопротивление при мостовой силовой схеме тиристорного преобразователя
![]()
где Rк – коммутационное сопротивление

где р – количество пульсаций выпрямленного напряжения за период сети (р = 6 для трехфазной мостовой схемы выпрямления);
– индуктивность при мостовой силовой схеме тиристорного преобразователя
![]()
– постоянная времени якорной цепи
3. Расчет параметров и характеристик тиристорных преобразователей для режимов непрерывного и прерывистого тока
Для тиристорного преобразователя якорного канала строим регулировочные и внешние характеристики в режимах непрерывного и прерывистого токов. Определяются: постоянная времени, коэффициент передачи для обоих режимов, внутреннее сопротивление для режима прерывистого тока.
Постоянная времени преобразователя равна
Построение характеристик производим в следующем порядке.
Максимальное значение ЭДС преобразователя
![]()
где: kсх – схемный коэффициент силовой цепи преобразователя (для трехфазной мостовой kсх =2,34).
Внешние характеристики в режиме прерывистого тока строим для нескольких значений α ( 0°,10° … 90° ). Для каждого значения α определяем граничный угол проводимости из уравнения

где Em = √2U2НЛ – для мостовой схемы выпрямления.
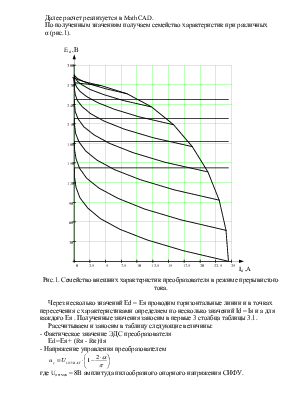
Далее расчет реализуется в MathCAD.
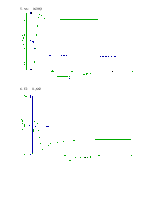
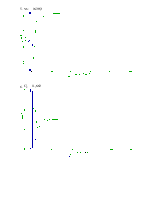
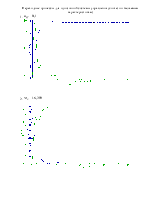
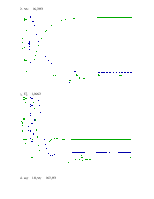
По полученным значениям получаем семейство характеристик при различных
α (рис.1).
Рис.1. Семейство внешних характеристик преобразователя в режиме прерывистого тока.
Через несколько значений Ed = Eя проводим горизонтальные линии и в точках пересечения с характеристиками определяем по несколько значений Id = Iя и а для каждого Eя . Полученные значения заносим в первые 3 столбца таблицы 3.1.
Рассчитываем и заносим в таблицу следующие величины:
- Фактическое значение ЭДС преобразователя
Еd=Ея + (Rя - Rк)∙Iя
- Напряжение управления преобразователем
где Uоп мах = 8В амплитуда пилообразного опорного напряжения СИФУ.
- Приращение тока якоря
![]()
- Приращение ЭДС преобразователя
![]()
- Приращение напряжения управления
![]()
где ![]() ,
,![]() ,
,![]() ― разность
соседних величин соответствующих величин
― разность
соседних величин соответствующих величин
- Коэффициент передачи преобразователя
Таблица 3.1 – Данные для построения регулировочных характеристик
преобразователя в режиме прерывистого тока
|
Eя,В |
Iя,А |
α,град |
Ed,B |
Uy,B |
ΔIя,А |
ΔEd,B |
ΔUy,B |
Ктп,о.е. |
|
|
142,5 |
0 |
90 |
142,5 |
0 |
― |
― |
― |
― |
|
|
0,75 |
80 |
142,515 |
0,889 |
0,75 |
0,015 |
0,889 |
0,017 |
||
|
5,875 |
70 |
142,6 |
1,778 |
5,125 |
0,085 |
0,889 |
0,096 |
||
|
18,75 |
60 |
142,875 |
2,667 |
12,875 |
0,275 |
0,889 |
0,31 |
||
|
183,75 |
0 |
80 |
183,75 |
0,889 |
― |
― |
― |
― |
|
|
0,625 |
70 |
183,762 |
1,778 |
0,625 |
0,012 |
0,889 |
0,0135 |
||
|
4,93 |
60 |
183,85 |
2,667 |
4,305 |
0,088 |
0,889 |
0,099 |
||
|
15 |
50 |
184,05 |
3,556 |
10,07 |
0,2 |
0,889 |
0,225 |
||
|
219,4 |
0 |
70 |
219,4 |
1,778 |
― |
― |
― |
― |
|
|
0,5 |
60 |
219,41 |
2,667 |
0,5 |
0,01 |
0,889 |
0,011 |
||
|
3,84 |
50 |
219,48 |
3,556 |
3,34 |
0,07 |
0,889 |
0,078 |
||
|
11,25 |
40 |
219,625 |
4,444 |
7,41 |
0,145 |
0,888 |
0,163 |
||
|
248,06 |
0 |
60 |
248,06 |
2,667 |
― |
― |
― |
― |
|
|
0,4 |
50 |
248,07 |
3,556 |
0,4 |
0,01 |
0,889 |
0,0112 |
||
|
2,65 |
40 |
248,11 |
4,444 |
2,25 |
0,04 |
0,888 |
0,045 |
||
|
7,32 |
30 |
248,2 |
5,333 |
4,67 |
0,09 |
0,889 |
0,1 |
||
 Ом
Ом

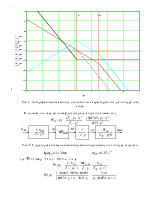
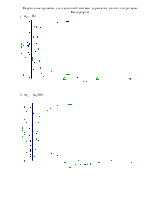
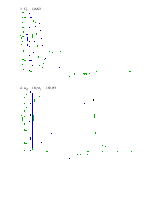
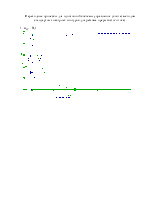
По уравнению регулировочной характеристики
задавая Uу = - Uоп мах,..., Uоп мах строим характеристику преобразователя для режима непрерывного тока.
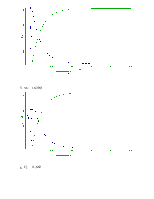
Затем, по данным из таблицы 3.1, в этих же осях строим семейство характеристик режима прерывистого тока, как показано на рис. 1. Выбираем рабочую точку, ближайшую к режиму электропривода с моментом сопротивления холостого хода. В этой точке определяем по наклону касательной коэффициент передачи преобразователя для режима прерывистого тока Kтп'=0,163. Рассчитываем полное сопротивление якорной цепи для режима прерывистого тока Rя' = Rяд + Rп'
Rя' = 0,01+ 2,6 =2,61 Ом
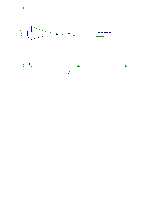
Рис. 2. Регулировочные характеристики преобразователя в режимах непрерывного и прерывистого тока.
4. Выбор структуры системы управления. Расчет параметров структурной схемы
Исходя из характера рабочей машины, выбираем однозонную систему управления.
Так как возможен режим работы "на упор", то следует применять 2 контура
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.